计算机控制技术论文哪里有?根据本课题的课题来源、研究目的、研究意义以及目前的研究现状,本文以配电网中常用的 SAPF 为研究对象,以 LADRC 作为核心算法,从直流侧电压控制和交流侧电流控制两个方面进行深入地分析和研究。并针对传统 LADRC 的不足提出改进方法,进一步提高其控制性能。
第一章 绪论
1.3 有源电力滤波器的研究现状
APF 作为一种用于动态抑制谐波、补偿无功的新型电力电子装置,是根据从电网中所提取的谐波指令电流,然后输出与其大小相等、方向相反的补偿电流来抵消非线性因素所产生的谐波电流[12]。1969 年,B.M.Bird 和 J.F.Marsh 最早发表了APF的相关论文,这被认为是APF基本思想的萌芽。1971年,日本学者H.Sasaki首次对 APF 的基本工作原理进行了完整的描述[13],[14]。1976 年,美国电气工程师L.Gyugyi 提出了用于 APF 控制系统的 PWM 电流跟踪控制方式,为进一步提高APF 的控制性能打下了坚实的基础。1983 年日本学者赤木泰文提出了基于瞬时无功功率理论的谐波电流检测方法,极大地推动了 APF 的应用和发展[15]。80 年代以后,APF 的实用化技术逐渐成熟,应用越来越广泛。
目前,APF 作为抑制电力系统谐波污染、补偿电网无功功率的重要电力电子装置,已广泛应用于世界各国。如日本的三菱电机、德国的西门子、美国的西屋电气等知名企业,这些企业和研究部门都已经有了相当成熟的产品技术。相对来说,到 1989 年我国对谐波问题以及滤波装置的研究才刚刚起步。到 90 年代以后,一些高等院校和科学研究机构才开始着手对 APF 进行理论研究和样机的研制。现如今,电能质量问题所带来的负面影响日益突出,但伴随着 APF 理论技术的不断进步,其工程应用也变的越来越成熟,以至于 APF 已发展成为目前各大电力系统企业的主要谐波抑制装置。近年来,APF 各项研究都得到快速的发展,主要集中在拓扑结构、控制策略以及优化配置等方面的研究。
计算机控制技术论文
............................
第三章 基于模糊 LADRC 的 SAPF 控制方法研究
3.1 线性自抗扰控制器的基本原理
3.1.1 线性自抗扰控制器的核心算法
ADRC 是由韩京清研究员所提出的,其思想源自于经典 PID 控制器输出反馈控制与现代控制理论状态反馈控制的结合。ADRC 最显著的特征就是将作用于被控对象内扰和外扰在内的一切不确定性因素定义为总扰动,以积分器串联标准型为最优的控制目标,利用被控对象已知的输入信号和输出信号对它进行快速地估计补偿[58]。ADRC 综合了数字控制、现代控制理论、PID 反馈控制以及非线性控制理论的优点而发展起来的一种新型控制技术。因此,PID 作为工业控制领域的通用型控制器,只要能够数字化和离散化,完全可以将 PID 控制器替换为 ADRC 控制器,使得整个控制系统的控制品质和控制精度获得根本性的提高。
作为 NLADRC 的核心元素非线性扩张状态状态观测器(Non-linear Extended State Observer,NLESO)采用了基于函数 fal 的非线性结构,非线性状态误差反馈控制律(Non-linear State Error Feedback,NLSEF)的设计同样采用了 fal 函数的非线性结构或者最速控制综合函数 fhan 的非线性组合。文献[59]给出了 fal 函数和最速控制综合函数 fhan 的具体形式。这种非线性控制技术能够有效地对作用于系统的总扰动进行估计补偿,从而很好地解决了 PID 控制器中所带来的”跟踪性“和”抗扰性“之间的矛盾问题,提高了系统的跟踪性和抗扰性[60]。同时,时间尺度概念的提出,能够将同一个系统和被控过程或者不同控制系统之间都按照时间尺度来分类,从而使得设计的 NLADRC 可以应用于同样时间尺度的不同对象上,从而具有较强的鲁棒性和适应性。
..........................
第四章 并联型有源电力滤波器的改进线性自抗扰控制研究
4.1 基于误差控制原理的改进型 LADRC
传统 PID 与传统 LADRC 都是基于误差而消除误差的控制原理。他们之间的区别在于,PID 作为目前 90%工业控制领域的控制器是通过控制被控对象输出的实际值与输入值之间的误差来使被控对象输出的实际值准确地跟踪给定值,使它们之间的误差趋近于零,而传统 LADRC 则是通过控制系统状态变量估计值与实际值之间的误差,使之达到预期的控制效果[86]。
控制系统的三大性能为稳定性、抗扰性和跟踪性。控制的首要问题是稳定性,而本质问题则是抗扰。传统 PID 控制器的抗扰性和跟踪性是一对矛盾,而自抗扰控制技术最大的优点就是能够利用 LESO 对总扰动进行估计补偿从而很好地解决这一矛盾问题。本节主要运用频域分析法对改进型 LADRC 控制的 SAPF 的稳定性、跟踪性和抗扰性进行分析。
.......................
4.2 仿真分析
根据图2.10所示的SAPF控制系统,利用Matlab2016b仿真软件中的Simulink仿真平台对传统 LADRC 和改进型 LADRC 控制下的 SAPF 分别进行仿真分析。其仿真模型如附录 A 所示,电压外环采用传统 LADRC 和改进型 LADRC 两种不同的控制器进行控制,电流内环采用滞环控制。非线性负载采用不可控整流器带阻感负载。其中电流内环滞环环宽大小设为 1,系统参数以及控制器参数见表 4.1和 4.2。
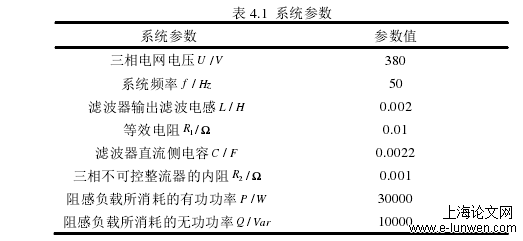
表 4.1 系统参数

表 4.2 传统 LADRC 和改进型 LADRC 控制器参数
在系统稳定的前提下,为更好地对比分析传统 LADRC 和改进型 LADRC 控制下的 SAPF 对系统谐波电流的动态跟踪速度和抗扰能力,本节以系统 A 相电流为例,对其进行仿真验证。
.........................
第五章 结论与展望
5.2 工作展望
通过对 SAPF 的工作原理和控制策略进行深入地分析和研究,验证了其对电网中非线性负载所产生的谐波电流能够进行有效地抑制和补偿,从而提高了电网的电能质量。本文虽然在 SAPF 的建模分析、LADRC 的改进以及应用等方面取得了初步成果,但仍存在着一些问题。在未来的研究中,还需要在以下方面进行进一步的研究:
1、本文所提出的两种应用于 SAPF 电压外环的改进型 LADRC 仅仅是做了仿真分析,其缺少物理实验验证和实际效果的对比分析,从而使得本文所提出的控制策略可能无法落实到工程实践当中。因此需要进一步搭建物理实验平台,进行实验验证。
2、本文采用的电流滞环控制虽然减少了整个系统控制器的数量,提高了参数整定的效率,但电流滞环控制存在着开关频率不固定以及滞环环宽选取不合适而使控制精度降低等缺点。因此可进一步对传统的电流滞环控制提出改进的方法,能够根据系统实际的谐波电流与 SAPF 输出的补偿电流之间偏差信号对滞环环宽做出自动地调整,以提高 SAPF 的工作性能。
3、本文是在电网电压为理想正弦波的条件下对 SAPF 的滤波性能进行深入的分析与研究。在实际应用中,电网电压可能会出现电压跌落、电压闪变以及三相不对称等情况。因此还需要在上述情况下,对 SAPF 的补偿性能和系统稳定性进行研究。
4、本文对第三章所提出的 Fuzzy-LADRC 控制器中模糊规则选择方面,没有给出详细的理论分析,仅仅通过一些工程实践经验和大量的仿真分析而得出的结论性结果,从而与实际应用案例存在着误差。因此在进行模糊控制应用型研究中,对模糊规则的选择需要结合具体的系统和案例进行理论上的分析和证明。
5、本文在第四章所提出的变结构改进型 LADRC 当中,虽然其控制效果要优于传统的 LADRC,但是增加了其控制算法的复杂度,使得该改进型 LADRC在应用过程中增加了参数整定的工作量,降低了效率,并且该改进型 LADRC 仍属于传统的算法。因此,在未来,采用传统 LADRC 的控制结构,使其与深度学习、强化学习以及数据驱动等智能算法相结合,使得人工智能算法和工业实用控制器相结合,进一步提高其控制性能。
参考文献(略)

