本文是计算机论文,本文主要研究了几类异质复杂网络的同步动力学问题.本文主要结果总结如下:最后,仿真结果分别说明了异质网络和同质网络相关结论的有效性.在实际情形中,由于复杂动态网络的物理特性和信息传输的局限性,控制输入会不可避免地受到限制,所以研究通讯受限的复杂网络十分有必要.针对一类异质复杂动态网络,本文提出了具有量化和输入饱和的采样协议,基于模型转化的方法,得到了含有扰动项的误差系统.利用李雅普诺夫稳定性理论,得出了误差系统指数收敛于有界椭球集合的充分性准则.进一步,在实际的复杂网络中,节点之间的连接非常复杂,且节点间的网络连接通常呈现出非光滑和多层次的特征.针对这些特征,本文研究了一类多层异质复杂网络的牵制同步问题,其中网络节点的动力学是互异的,连接节点的两层结构也是异质的.
......
第一章绪论
本文主要研究了几类异质复杂动态网络的同步问题,主要考虑了异质LC振子耦合网络、通讯受限下异质网络和多层异质网络的同步问题,具体内容如下:(1)异质LC振子耦合网络的同步分析第三章讨论了异质LC振子耦合系统的同步问题.针对一类由异质LC振子耦合的复杂网络,通过采样控制协议,证明了网络最终可以实现拟同步.基于时滞输入和李雅普诺夫稳定性理论,给出了系统实现拟同步的充分性判据,并进一步估计了异质系统实现拟同步的误差上界.最后,仿真例子说明了理论结果的有效性.(2)通讯受限下异质复杂网络的同步分析第四章研究了通讯受限下异质复杂网络的同步问题.针对基于采样控制协议和输入饱和限制的异质复杂动态网络,通过引入领导者并设计具有量化和输入饱和的控制器,将异质复杂动态网络转化为具有有界扰动的误差系统.利用李雅普诺夫稳定性理论,给出了确保误差系统可以指数稳定并收敛到有界区域的充分判据.基于该判据,进一步设计了反馈增益矩阵.最后仿真例子说明了理论结果的有效性.
.....
第二章预备知识介绍
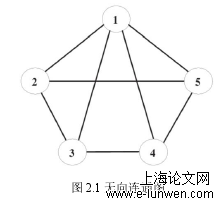
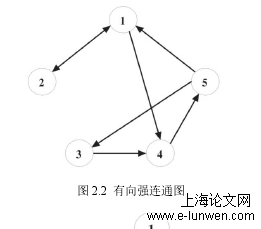
2.1网络的图论知识
通常,为了满足有限通信数据的传输带宽限制和通信时间的限制,量化和采样在信息传输中起着关键作用,也得到了广泛的关注和研究.针对具有饱和量化测量的线性时变控制系统的反馈镇定问题,利用一种新的控制设计方法实现了系统的全局渐近稳定性.与单个的个体相比,复杂网络系统可以通过局部的分布式协作来完成共同的任务,涌现出丰富的群体动力学行为.在复杂网络的群体动力学行为研究中,同步行为因其重要的现实意义而受到广泛关注,成为复杂网络的群体动力学研究的基础.关于同步现象的研究始于十七世纪,物理学家惠更斯观察到悬挂于同一横梁上的钟摆终将会趋于同步.在自然界中,成千上万只同步闪烁的萤火虫,井然有序跳动的心脏起搏细胞,不计其数的电子在超导体中一致前进,这些同步行为都揭示了某些规律性的现象.由于同步现象引起的利弊广泛影响着各个领域,因此复杂网络的同步有必要并且值得深入研究.
2.2网络的矩阵知识
本章主要介绍了与复杂网络的同步有关的图论基础知识.复杂网络的研究始于图论,图的邻接矩阵可以刻画网络的本质拓扑结构,图的拉普拉斯矩阵可由该图的邻接矩阵来表示,这些基础知识对于复杂网络的理论研究和数值仿真至关重要.多层异质复杂网络的同步分析第五章研究了多层异质复杂网络的同步问题.针对一类多层异质复杂网络,其中领导者具有外部非零输入且状态不可测,通过设计两类不同的耦合规则,实现了多层异质复杂网络的拟同步.同时,基于李雅普诺夫稳定性理论和矩阵理论,给出了牵制拟同步的充分条件,并得出了拟同步的误差上界.最后,数值仿真验证了理论结果的有效性.近些年,复杂网络已被多个领域的学者们广泛研究,并取得了众多成果.然而,上述文献没有考虑采样和量化的影响.实际上,复杂动态系统由于系统物理特性及实际通信影响,其控制输入不可避免地会受到极大的限制.例如,信息在实际系统的传输过程中往往存在通信带宽和通信时间的限制.
第三章异质LC振子耦合网络的同步分析...........................8
3.1LC振子耦合网络系统的模型........................8
3.2LC振子耦合网络系统的同步分析..........................10
3.3仿真实例.........................13
3.4本章小结.........................16
第四章通讯受限下异质复杂网络的同步分析...........................17
4.1通讯受限下异质复杂网络的模型...........................17
4.2通讯受限下异质复杂网络的同步分析.........................18
第五章多层异质复杂网络的同步分析..............................32
5.1非光滑系统...........................32
5.2多层异质复杂网络模型.................33
5.3多层异质复杂网络的同步分析.........................35
......
第五章多层异质复杂网络的同步分析
5.1非光滑系统
上一章研究了通讯受限下异质复杂网络的同步问题,通过李雅普诺夫稳定性理论,得到了误差系统趋于有界范围的充分条件.而随着复杂网络研究的逐渐深入,我们有必要研究更复杂和更实用的复杂网络.本章将研究多层异质复杂网络的同步问题.但是迄今,复杂网络领域的研究大多是基于单层网络,实际复杂系统中多种网络交互作用的情况被忽视.例如,包含多种运输工具(铁路网、航空网和公路网)的交通网络,包含基因调控网络、代谢网络、蛋白质-蛋白质相互作用网络的生物网络等.因此,单层网络已无法满足实际复杂网络系统的研究需求,因此,本章提出了一种具有多种交互特性的多层网络.如图5.1所示,这个多层网络具有两种不同的拓扑连接.本章研究了一类多层异质复杂网络的牵制拟同步问题,其中节点的动力学是异质的,且连接的两层拓扑结构也是异质的.同时,动态领导者的外部控制输入非零且不可测.为了实现多层异质网络的拟同步随着复杂网络的研究成果日益丰富,研究更复杂、更实用的复杂网络有了坚实的研究基础和强烈的现实需求.例如,网络节点往往呈现出异质特征,网络连接呈现出非光滑、多层次的特征.
5.2多层异质复杂网络模型
由假设5.1和目标系统分别可得0.0128和0w0.1.图5.8和图5.9分别是动态耦合下网络节点状态和误差状态图,从图中可以看出,异质多层复杂网络的拟同步误差状态最终趋于有界范围,即异质多层网络实现了拟同步.图5.10是自适应耦合强度随时间变化轨迹.从图5.10可以看出,自适应耦合最终稳定到常值.基于自适应,为了更直观地描述拟同步收敛速度与耦合强度1c之间的关系,我们绘制了图5.11.图5.11表明实现拟同步的收敛速度与1c的值呈正相关.上述仿真结果说明了定理5.2中所提出的理论结果的正确性.这些因素给复杂网络的同步研究带来了巨大且不可避免的挑战.近年来,人们开始关注由多种连接方式所构成的具有多层拓扑结构的复杂网络,也被称作“网络的网络”或“多层网络”.大多数的实际工程网络系统都具有多层拓扑结构,通过设计低增益状态反馈方法,使得所有跟随者与领导者在切换拓扑结构下可以实现饱和多智能体系统的半全局一致性.
......
第六章总结与展望
同时,领导者具有非零外部输入且系统状态不可测.本文分别设计了静态耦合和动态自适应耦合,并利用李雅普诺夫稳定性理论和矩阵理论,给出了异质多层网络系统实现拟同步的充分条件.最后,利用数值仿真验证了所得结论的有效性.上述研究成果对于复杂网络这个领域来说只是沧海一粟,复杂网络仍值得我们不断深入探究.基于上述研究,个人觉得今后可探究的方向如下:(1)考虑实际情况的复杂性,复杂网络节点间的信息交互通常都具有时间滞后性.面对时滞这一因素,如何设计控制协议,采取何种分析方法来实现同步是今后研究的一个重要方向.(2)针对通讯受限的异质复杂网络,本文通过设计采样控制这一策略实现了网络的拟同步.实际的网络系统往往是复杂的,系统中不同的个体难以对全部的物理信号都采用统一的采样速率,因此研究异步采样或者异步系统模型是今后研究的又一个方向.
参考文献(略)
参考文献(略)

