本文是计算机论文,本文主要介绍了手工设计特征配合支持向量机的传统方法和深度学习方法两类车辆检测(vehicledetection)方法的流程和其背后的数学原理。并在TitanX和JetsonXaiver计算平台上进行了实现、验证和对比,得出了传统方法和深度学习方法得差异。在传统方法的一些帮助下,针对特定工况,对深度学习方法的进行优化。同时,对模型进行压缩、加速、序列化并反序列化部署在不同平台。最后,利用实验中的模型,集成到公司L3原型车上,取得了初步的效果。与毫米波雷达获得前方物体的深度信息融合后,为实车自适应巡航控制(AdaptiveCruiseControl,ACC)模块和车道保持(LaneKeepingAssist,LKA)模块提供了前方车辆的数目和相对位置信息。主要的工作内容和技术难点如下:1)传统方法对计算机图像学有较强的依赖,尤其是在特征工程方面。需要手动调试大量参数。(2)实验过程中对比和使用了大量算法,整理了支持向量机和深度神经网络的数学原理,FasterRCNN、YOLO和SSD算法的主要原理,以及物体检测问题中的评价指标和常见优化方法。(3)实验中使用了大量不同设备采集的不同标注方法的数据集,需要争对性的做多套数据处理工具。(4)实验面对了不同的使用场景,过程中采取了不同的计算设备,服务器进行模型训练,车计算设备JetsonXaiver进行模型部署。不同架构的设备的作业流程的同步,尤其在利用TensorRT对模型进行不同模式量化和反序列化部署工作量较为繁琐。
......
第一章绪论
作为智能交通系统的一个重要组成部分,汽车自动驾驶技术旨在使汽车在不需要人类干预下,便自动完成对环境的感知和本车运动的规划和控制。汽车自动驾驶技术的潜在优势包括:降低基础设施成本,提高安全性,提高机动性,提高客户满意度并减少犯罪,特别是交通事故造成的伤害、相关费用以及保险需求的减少。预计汽车自动驾驶技术会增加交通流量,同时也为儿童、老年人、残疾人和穷人等提供增强的机动性,缓解旅行者的驾驶和导航等杂事,降低油耗,大大减少对停车位的需求,并促进运输服务相关的商业模式2]。汽车自动驾驶技术涉及感知、定位、控制、规划以及计算机技术等众多学科的前沿研域,是多种技术结合的产物[3-4]。汽车自动驾驶技术的四个重要分支为环境感知、定位导航、路径规划和运动规划控制。环境感知系统作为重要的一环,为自动驾驶汽车提供了周围障碍物、车辆和行人等信息(如图1.1),是车辆实现避障路径规划等高级智能行为的前提和基础,是乘客和车辆的安全保证。本文将针对环境感知中的车辆识别检测问题进行进一步的讨论。

.....
第二章特征工程
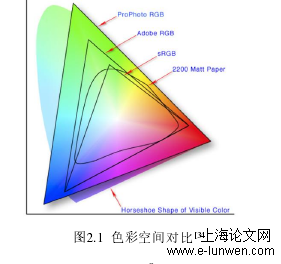
2.1色彩空间
色彩空间是表示颜色方法的抽象数学模型,结合物理设备配置,在模拟和数字表示中重现色彩表现。色彩空间将特定的颜色分配给一组物理色样和相应的指定名称或数字每种颜色模型都是一个抽象的数学模型,颜色可以表示为数字元组的方式(例如RGB中的三元组或CMYK中的四元组)。定义色彩空间时所采用的参考标准通常是CIELAB或CIEXYZ色彩空间,它们专门设计用于包含人类可以看到的所有颜色。不同的色彩模型定义了不同的色彩空间,因此需要添加专门的映射函数来在参考色彩空间内建立明确的色域。由于色彩空间确定了色彩模型和映射函数的特定组合,因此色彩空间名称如RGB、HSL、HLV和YCbCr等,通常用于非正式地识别颜色模型。严格意义上这种用法不正确AdobeRGB和sRGB是几种种均基于RGB色彩模型的不同的绝对色彩空间(如图2.1)[34]。然而由于识别颜色空间会自动识别关联的颜色模型,本文实验中沿用了这类非正式的表方法。色彩空间是表示颜色方法的抽象数学模型,结合物理设备配置,在模拟和数字表示中重现色彩表现。色彩空间将特定的颜色分配给一组物理色样和相应的指定名称或数字。每种颜色模型都是一个抽象的数学模型,颜色可以表示为数字元组的方式(例如RGB中的三元组或CMYK中的四元组)。定义色彩空间时所采用的参考标准通常是CIELAB或CIEXYZ色彩空间,它们专门设计用于包含人类可以看到的所有颜色。不同的色彩模型定义了不同的色彩空间,因此需要添加专门的映射函数来在参考色彩空间内建立明确的色域。由于色彩
空间确定了色彩模型和映射函数的特定组合,因此色彩空间名称如RGB、HSL、HLV和YCbCr等,通常用于非正式地识别颜色模型.严格意义上这种用法不正确AdobeRG和sRGB是几种种均基于RGB色彩模型的不同的绝对色彩空间(如图2.1)[34]。然而由于识别颜色空间会自动识别关联的颜色模型,本文实验中沿用了这类非正式的表示方法。
2.2颜色直方图特征
由于车辆的颜色通常处于几种常见的类型且与环境有较大的区别,因此我们选择了车辆样本和道路背景样本做直方图比较(如图2.5)。由于车辆识别的暴晒和阴影交替的工况经常出现,车辆和非车辆样本的在RGB的表示下颜色直方图特征在R,G,B三个通道均非常不稳定,所以我们也尝试了其他色彩空间,如HSV、HLS和YCrCb。HO特征所依赖的基本思想是图像局部区域像素梯度和边缘方向的分布可以描述图像中物体大致外观和形状(如图2.6)。在图像被分成密集的均匀间隔细胞单元的小连通区域后,对于每个细胞单元内的像素,求得梯度或边缘方向的直方图。将这些直方图拼接后便获得了HOG。通过计算图像较大区域块的亮度测量值对块内所有单元格进行归一化,可以使得HOG特征在光照和阴影变化的场景中具有更好的鲁棒性[12-13]。
.......
第三章支持向量机和卷积神经网络........................15
3.1分类器........15
3.2支持向量机16
3.3多层感知机19
3.4卷积神经网络................................................22
第四章目标检测与跟踪方法...................................27
4.1传统检测方法...............................................27
4.2深度学习方法...............................................27
第五章基于异构计算平台的深度学习应用研究...35
5.1异构计算平台概述.......................................35
5.2CUDA和cuDNN..........................................36
5.3深度学习框架的研究...................................37
.......
第六章实验设计与分析
6.1数据集
针对本文涉及的应用场景,使用了如图6.1所示的单摄像头和多摄像头两种硬件方案。其中单目摄像头方案和实车最终部署方案接近,多摄像头方案具有更广的视角,能弥补实车采集过程中车辆运动轨迹限制对镜头的约束,尤其是大偏航角工况下长时长下的数据采集,进而能更好地覆盖航向偏移和变道时的场景。采集装置安装在车辆前挡风玻璃下(如图6.1),采集了在中国长三角、珠三角和华北地区的行车过程中1280x72像素(如6.2)和5571*1093像素(如图6.3)的视频序列,其中所摄像头方案将各摄像头图像变换拼接后如图6.3所示。以最大化车辆类别代表性(轿车、卡车、巴士、面包车)和涉及天气高度可变性(晴天、阴天、雨天、黄昏、夜间和雨天夜间)为目的,从行车视频序列中来提取了25500张图片,并委托第三方机构标注了车辆类别、交通标志、道路边界、车道线和停止线信息。本文主要使用的是不同视角拍摄车辆后部外观的图像数据,以及道路背景中提取的图像数据。
6.2实验环境
论文中使用的软硬件实验环境如表6.1和表6.2所示。其中,推理实验选用两种环境主要由于,实验过程中Xavier交付时间不确定,有一定风险会延期交付,因而在TitanX平台上先行测试评估,与此同时TitanX由于功耗大,不符合车规要求,因而并不能替代Xavier方案。由于模型输出的置信度通常是连续的,选择不同的置信度阈值输出的结果常伴随着不同的输出,因而Precision-Recall曲线(PRCurve)是评估目标检测器或分类器性能的好方法。多分类问题中每个对象类都有一条曲线。如果一个特定类别的目标检测器的预测精确率,随着召回的增加而保持高水平,则被认为是好的。评价目标检测器性能的一种指标是计算PR曲线的曲线下面积(AreaUnderPRCurve,AUC)。
.......
第七章总结与未来的工作
根据当前论文中出现的问题,拟通过如下方面进行优化:(1)实验过程中,对模型输出结果的二分类简化,丢失了很多对车辆行驶过程中信息。仅车与非车的结果输出,低于行业前沿量产产品可以区分大小型车辆、摩托车用户的水平,故而可以使用更具有针对性的数据集,实现对车辆类型的细分,实现可行驶区域的检测,并添加对行人的检测和跟踪;(2)针对使用场景特点,在跟踪算法部分引入新的模型,更好地利用视频信息中时序之间的关系,尝试引用基于贝叶斯理论的概率模型,诸如卡尔曼滤波器等等,使得目标跟踪的过程更加的稳定。同时,由于面对的实际工况中,多车之间的相对位置经常变动,为了给之后的行为理解做技术储备,拟对每个识别出的目标赋予ID,并且互相区分。
参考文献(略)

