首先对课题所涉及的技术和算法进行讨论,其中包括中国目前所使用的两种定位系统、模糊控制系统的整体构造以及各部分的原理和作用、容积Kalman滤波算法的原理和流程、几种运动模型以及交互多模型算法的流程、速率积分陀螺仪的数学模型。更具体的工作及研究成果如下。1、由于传统二维平面内的定位技术无法直接应用到三维空间中来,针对车辆在复杂三维路况下高度定位误差太大的问题,论文基于车辆在二维平面或曲面上的运动,改进了一种车辆空间定位方法。将三维空间的定位问题变换到二维平面内,利用估计的平面内位置信息来求解高度信息,从而提高其定位精度。再利用三维GIS辅助车辆定位,有效解决车辆桥上下不分和车辆悬浮于导航系统中的现象。2、针对二维平面内的车辆定位精度进行进一步提高。在非线性运动模型下,由于观测噪声方差易受环境干扰,一般不会是固定值。考虑到需要对观测噪声方差实现自适应调节,在CKF中引入模糊控制理论,将系统残差的实际协方差和系统残差的理论协方差的比值通过模糊推理系统,利用模糊推理系统的输出值分别对观测噪声方差进行修正,从而产生了DFCKF滤波器。
........
第一章绪论
随着人类出行次数增多,车载跟踪定位问题越来越受到重视。本文主要研究利用坐标变换的方法解决车辆在三维路况下的定位问题。再者增加一个新的观测量,用以提高车辆的定位精度。然后在引入模糊控制的情况下,将基于分布式模糊控制的容积Kalman滤波算法与交互多模型算法相结合,进一步提高平面内的定位精度,同时在具体研究时,首先利用初始状态量,采用非线性模型的滤波算法对状态量进行估计,然后利用观测信息对其进行修正。观测信息由GPS和速率积分陀螺仪采集获得[10]。本文的研究内容和章节安排如下:第一章为绪论部分,简单介绍了课题的研究背景和意义、车辆定位中使用到的几种常见的导航技术以及模糊理论的发展。第二章为定位技术及模糊理论,简要介绍了全球定位系统GPS和北斗卫星导航系统BDS的导航原理,接着介绍了模糊推理系统、容积Kalman滤波的过程和原理以及交互多模型算法和几种运动模型,最后介绍了速率积分陀螺仪的测量原理。
.........
第二章定位技术及模糊控制系统
2.1全球定位系统GPS
空间部分是由许多工作卫星组成的,六个轨道各均匀分布四颗卫星。在全球不管何时何地都可以检测到四颗以上的卫星,用来提供导航数据和接收地面控制中心的命令。用户装置就是指安装在移动车辆上的信号接收机,用来捕获跟踪的卫星信号。当接收机捕捉到信号后,就可以测量出天线和卫星之间的伪距离以及变化率,解调出相关的卫星轨道数据,处理器将利用解算方法计算出车辆的速度、经纬度、高度以及时间等信息。接收到的时间信息可以精确至纳秒级。但是在GPS的观测量中包含一些误差,包括多径效应和大传播时延等,在定位计算时可能会导致计算不准。GPS在社会的各个领域都有其应用的身影,因其具有的全方位、全天候、高精度的定位特而被普遍应用。主要应用领域有:飞机航路指引、远洋船舶导航、汽车定位导航、个人通讯终端以及地形勘测。GPS应用在道路工程中,主要是测定一些外控点以及建设各种道路交通网。GPS的主要功能就是三维导航,提供给车辆、飞机、船舶以及行人等。利用GP和电子地图进行车辆导航,可以实时显示车辆实际位置[12]。
2.2北斗卫星导航系统BDS
上世纪后期,BDS的探索之路开启,形成了基本的发展战略。20年前,北斗一号系统建设成功,并且开始向中国部分区域提供定位服务。8年前,北斗二号系统建设成功,并且这次的服务范围扩展到了亚太地区。2018年底,北斗三号系统也顺利建设成功。除此之外计划在2035年前建设成更广泛更智能的综合时空导航体系。随着BDS的逐步建立以及服务能力的提高,应用其的相关产品从交通领域渗透到气象领域,为各行各业提供全天候高精度的定位,也为人类的生活注入了活力,提供便利。从2018年12月27日起,中国北斗卫星导航系统的服务范围由部分区域扩展为全球区域,这也标志着中国的北斗系统正式迈入全球时代[14]
..........
第三章基于坐标变换的车辆三维定位研究...........................22
3.1坐标变换原理................................................................22
3.2三维GIS在坐标变换中的应用..................................27
3.3仿真实验及结果分析...................................................28
3.4本章小结.........................................31
第四章模糊自适应容积Kalman滤波在车辆定位中的应用................................32
4.1基于分布式模糊控制的容积Kalman滤波(DFCKF)算法原理......................32
4.2DFCKF的仿真分析..................35
4.3改进的DFCKF算法....................................................45
4.4IMM仿真系统模型建立..............................................49
4.5IMM-DFCKF的仿真分析............................................51
第五章总结与展望.....................................................................63
..........
第四章模糊自适应容积Kalman滤波在车辆定位中的应用
4.1基于分布式模糊控制的容积Kalman滤波(DFCKF)算法原理
实验模拟车辆在三维路况场景下进行DFCKF滤波[54],观测量选择有GPS提供的三维位置信息和速率积分陀螺仪提供的方向角。本次实验模拟的是在有速率积分陀螺仪和没有速率积分陀螺仪组合导航的情况下车辆的定位精度的比较。实验参数设定为:GPS给出的X、Y方向的误差标准差为10米,Z方向的误差标准差为20米,速率积分陀螺仪的误差标准差为10°/h。车辆初始位置位于(100m,500m,0m)处,X方向初速度为0m/s,Y方向初速度为10m/s,Z方向初速度为0m/s,在前250个滤波时刻,车辆在X方向和Y方向都做匀速直线运动。在第250个滤波时刻准备上坡,坐标系开始转换,坡度和坡向设置为3°和45°,在爬坡时车辆进行变速运动多次拐弯,在三维空间内运动轨迹呈现蛇形。实验滤波时间为250s。
4.2DFCKF的仿真分析
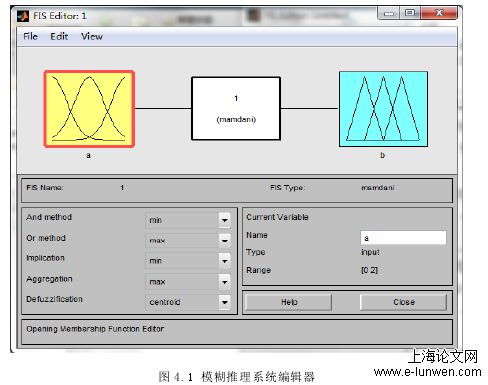
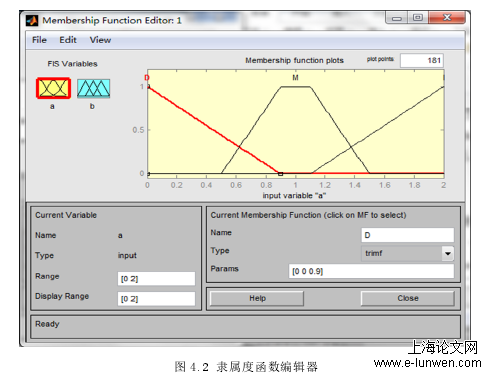
本节介绍DFCKF的仿真实验,首先介绍模糊推理系统的matlab仿真设计,然后对于仿真实验侧重了两方面。第一,在观测量方面添加了速率积分陀螺仪,通过仿真结果检测是否对精度提高有帮助。第二,将DFCKF与CKF相比,通过仿真结果检测是否对精度提高的航向角。图4.11和图4.12分别是在无速率积分陀螺仪和有速率积分陀螺仪情况下的车辆X方向速度估计图和车辆Y方向速度估计图。对比来看,虽然图上不是很明显,但在细微处可以看出有速率积分陀螺仪情况下的车辆速度估计比没有速率积分陀螺仪情况下的车辆速度估计要略准确。图4.13是无速率积分陀螺仪和有速率积分陀螺仪情况下的车辆定位误差。计算的是车辆水平方向定位的均方根误差,即分别先求得X和Y方向的位置估计误差,然后求它们的平方和之后再开二次根号。可以明显看出有速率积分陀螺仪情况下的车辆定位误差整体幅度更小,更稳定,稍微大点的误差也只在少数滤波点处出现。
.........
参考文献
[1]王国锋,宋鹏飞,张蕴灵.智能交通系统发展与展望[J].公路,2012(5):217-222.
[2]陆化普,李瑞敏.城市智能交通系统的发展现状与趋势[J].工程研究-跨学科视野中的工程,2014(1):6-19.
[3]高韬,刘正光,岳士宏,等.用于智能交通的运动车辆跟踪算法[J].中国公路学报,2010,23(3):89-94.
[4]刘基余.GNSS全球导航卫星系统的新发展[J].遥测遥控,2007,28(4):1-6.
[5]GongH,ChenC,BialostozkyE,etal.AGPS/GISmethodfortravelmodedetectioninwww.zhonghualw.comNewYorkCity[J].ComputersEnvironment&UrbanSystems,2012,36(2):131-139.
[6]QuS,DingK,LiQ.AneffectiveGPS/DRdeviceandalgorithmusedinvehiclepositioningsystem[C]//IntelligentTransportationSystems.2003.
[7]曹洁,张慧宁.基于GPS/DR的地图匹配方法的研究与实现[J].计算机工程与设计,2008,29(18):4810-4812.
[8]DaileyDJ,BellBM.AmethodforGPSpositioning[J].IEEETransactionsonAerospace&ElectronicSystems,1996,32(3):1148-1154.
[9]HuangZ,HuangD,ZhuX,etal.GPSVehiclePositioningMonitoringSystemIntegratedwithCORSandMobileGIS[J].ProcediaEnvironmentalSciences,2011,10:2498-2504.
[10]AKalmanfiltermodelforGPSnavigationoflandvehicles.CooperS,DurrantWH.IEEEConferenceonIntelligentRobotsandSystems(IROS‘94).1994
........

