本文主要工作如下:(1)对现有的任务分配模型 CMTAP 进行了扩展,引入了无人机的武器载荷约束并在任务类型中加入了巡航任务,建立更符合战场需求的任务分配模型。在进行任务动态重分配时,部分无人机执行任务序列发生改变,需要对无人机机群的任务分配结果进行局部调整,将任务序列的调整问题建模成 TSP。(2)提出了基于 SOM 神经网络的任务分配方法,根据环境信息进行网络的初始化并结合了 SOM 神经网络的两种学习规则求解任务分配方案;提出了基于分组策略的任务动态重分配方法,首先使用基于 SOM 神经网络的聚类算法对待重分配的任务和无人机进行分组聚类,然后使用引入精英蚁群的蚁群算法对执行任务集合更改的无人机进行任务序列的调整。(3)提出了基于 Q 学习的动态环境下无人机路径规划方法。根据路径规划问题特性建立了马尔可夫决策过程模型。在 MDP 模型基础上,利用 Q 学习对动态环境良好的适应性,能够在环境信息未知或者部分未知的情况下进行学习的特性,结合效用追踪技术,为无人机规划出一条能避开威胁区域的较优飞行路径。
.......
第一章 绪论
国内外学者对多无人机机协同任务规划问题进行了大量的研究,并取得了丰硕的理论成果。随着战场规模越来越庞大,无人机执行任务的类型越来越多样化,约束条件越来越多,目前的任务规划技术存在着模型与实际环境不符,算法的执行效率过低,动态环境下算法的响应能力不足等缺点,所以只有对目前的技术不断改进,才能顺应无人机技术发展的潮流。本文采用的具体的任务规划流程如图 1.1 所示。首先收集战场信息,然后进行任务规划问题的分析与建模,采用任务分配算法求解得到无人机执行任务的序列,根据任务序列进行无人机航迹规划。当无人机编队在执行任务的过程中遭遇突发情况时,使用任务重分配方法对局部无人机任务序列进行调整,并对任务序列改变的无人机重新进行路径规划,直到无人机机群任务执行完成,整个规划过程结束。本文依据上述流程,从多机协同任务规划问题的建模、多机协同任务分配、多机协同任务重分配、无人机路径规划这四个层面对动态环境下的多机协同任务规划展开研究,并对当前存在的问题提出解决方案。
........
第二章 多无人机协同任务分配与动态重分配问题分析
2.1多无人机协同任务分配问题建模
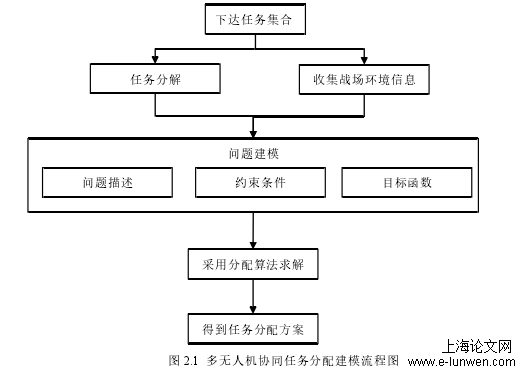
多无人机协同任务分配建模是任务分配的重要步骤,任务分配算法需要在任务分配模型的础上进行求解。建模流程如图 2.1 所示,任务规划系统首先接收上级下发的任务集合然后进行任务分解,将任务集根据任务类型分解为一个个可分配给无人机执行的子任务。同时对战场信息进行收集,包括无人机当前坐标、任务点坐标、威胁区域信息等。在完成任务分解和战场信息收集这两个准备工作后,进行问题的建模,建模包括问题描述、设定约束条件、建立目标函数三个步骤。建模完成后,可以采用合适的分配算法进行求解,并得出任务分配的方案。本文在 CMTAP 模型的基础上,综合考虑了异构无人机执行包含多种任务类型的任务集合的情况,扩展了约束条件,建立了满足无人机飞行安全和任务需求的多无人机协同任务分配模型,且使得建立的模型更符合战场的需求。
2.2多无人机协同任务动态重分配
经过多机协同任务分配后,无人机按照任务分配方案依次去执行任务。而实际的战场环境是一个动态环境,整个战场的信息不是一成不变的,无人机或者任务点的状态随时都会发生改变,无人机任务分配的方案也要随之改变。因此,需要进行动态环境下的无人机任务重分配。通过任务重分配能让无人机更快的适应动态变化的环境,提升了无人机任务规划系统的稳定性和响应能力。所以任务重分配对实时性要求较高,希望在快速求解的基础上得到一个较优的重分配方案,若继续采用 2.1 节介绍的多机协同任务分配模型和相应算法进行求解,则代价太大,显然是不合适的。所以要根据任务重分配的特点,简化重分配模型,提升算法的执行效率,对无人机机群内的局部无人机进行任务分配方案和任务执行次序的调整。
.........
第三章 基于 SOM 神经网络的多无人机协同任务分配与重分配方法 ............20
3.1 自组织特征映射神经网络简介.........20
3.2 基于 SOM 神经网络的多无人机协同任务分配算法步骤............................................22
3.3 基于 SOM 神经网络和蚁群算法的任务动态重分配方法...........................................25
第四章 动态环境下基于 Q 学习的无人机路径规划方法......33
第四章 动态环境下基于 Q 学习的无人机路径规划方法......33
4.1 Q 学习算法.................................33
4.2 效用追踪技术............................35
4.3 无人机路径规划问题的模型构建.........................36
4.4 无人机路径规划方法流程........39
4.5 仿真实验.....................................39
4.6 本章小结....................................41
第五章 仿真实验与结果分析.................42
5.1 对比实验与结果分析................42
5.2 多无人机任务规划仿真系统实验分析.................44
5.3 本章小结....................................46
.......
第五章 仿真实验与结果分析
5.1对比实验与结果分析
实验将基于 SOM 神经网络的多无人机协同任务分配算法的实验结果与蚁群算法的实验结果进行对比,蚁群算法是一种典型的群算法,被广泛应用于多无人机任务分配领域。对于同一个实验算例,本文根据式 2.5 计算任务分配的代价,并从平均任务分配代价、最小任务分配代价、平均执行时间三个方面对两个算法进行比较。实验结果如表 5.1 所示,表中第一列为 VRPLIB 中的某个算例的名称,例如‘E022-04g’表示 4 架无人机从同一位置出发去执行 21 个任务。从表 5.1 中看出使用基于 SOM 神经网络的任务分配算法进行多无人机协同任务分配的平均任务分配代价和最小任务分配代价均优于蚁群算法,且随着任务数目的增加,SOM 算法的任务分配效果越来越显著。蚁群算法由于信息素累积过快等原因容易陷入局部收敛,而 SOM 算法通过模拟生物大脑的响应机制,具有自组织、自适应的特性,可以在算法执行过程中探索出更优的任务分配方案。
5.2多无人机任务规划仿真系统实验分析
将本文研究实现的算法封装成 WEB 服务接口加入到无人机任务规划仿真系统中,当接收到调用接口的请求时,系统将调用相应的算法,获取任务规划的结果,并通过仿真系统进行结果的展示和比较。图 5.2 为无人机任务规划仿真系统的任务分配模块,在选择完任务分配场景和任务分配算法后,可进行任务分配。图 5.3 为一个在包含 20 架无人机和 30 个任务的场景下采取基于SOM 神经网络的任务分配算法计算得到的分配结果。图 5.4 为无人机任务规划仿真系统的任务重分配模块,在图 5.4 所示的任务分配结果基础上新增一个攻击任务,并调用基于 SOM 神经网络的任务重分配算法进行计算,得到的重分配结果如图 5.5 所示。
.........
参考文献
[1] 王重秋,李锋,张靖.无人作战飞机系统综述[J].电光与控制,2004,11(4):41-45
[2] 周军,藏晓京.武装无人机与无人作战飞机[J].飞航导弹,2005,(1):9-13
[3] 秦博,王蕾.无人机发展综述[J].飞航导弹,2002(08):4-10.
[4] 李晗,苏京昭,闫咏.智能无人机集群技术概述[J].科技视界,2017(26):5-7.
[5] 牛轶峰,肖湘江,柯冠岩.无人机集群作战概念及关键技术分析[J].国防科技,2013,34(05):37-43.
[6] Rostami AS, Mohanna F, Keshavarz H, et al. Solving Multiple Traveling Salesman Problem usi1ng theGravitational Emulation Local Search Algorithm[J]. Applied Mathematics & Information Sciences, 2015,9(9):1-11.
[7] GuX,CaoX,XieY, etal.Cooperative trajectoryplanning formulti-UCAVusing multiple traveling salesmanproblem[C]. 2016 35th Chinese Control Conference (CCC). IEEE, 2016.
[8] Schumacher CJ, Chandler PR, Pachter M, Pachter L. Constrained optimization for UAV task assignment. In:Proceedings of theAIAAguidance, navigation, and control conference, Providence, RI. 2004.
[9] Omer J , Farges J L . Hybridization of Nonlinear and Mixed-Integer Linear Programming for AircraftSeparation With Trajectory Recovery[J]. IEEE Transactions on Intelligent Transportation Systems, 2013,14(13):1218--1230.
[10] Weinstein A L, Schumacher C. UAV Scheduling via the Vehicle Routing Problem with Time Windows (Preprint)[J]. Uav Scheduling Via the Vehicle Routing Problem with Time Windows, 2007.
[11] Zorlu O. Routing unmanned aerial vehicles as adapting to capacitated vehicle routing problem with genetic algorithms[C].International Conference on RecentAdvances in Space Technologies. IEEE, 2015:675-679.
[12] Shima T , Rasmussen S J , Sparks A G , et al.www.zhonghualw.com Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers and Operations Research, 2006, 33(11):3252-3269.
..........

