第 1 章 绪论
1.1 课题研究的目的及意义
本课题针对目前快速发展的软体机器人,以及混杂了传统刚体材料部件和软件材料部件的刚软混杂机器人进行了调研,发现了其中对于刚软混杂机器人的仿真工作目前仍然存在许多困难。其主要原因为刚体和软体机器人所使用的结构材料不同,所表现的运动性质不一样,其运动学和动力学建模存在着本质的不一样。
目前的仿真工具或平台通常使用不同的方法分别对刚体和软体进行建模和计算,从而基于该工具或平台所发展的机器人工具链也不同互相兼容。这意味着,现在的刚体和软体仿真工具及其附属工具链都无法应用在刚软混杂机器人上。包括发展得很成熟的刚体机器人工具链,如机器人建模、环境建模、运动控制、任务规划等软件功能包,以及软体机器人工具链,如软体驱动器建模、可变形体姿态控制、接触力控制等软件功能包。
随着软体机器人和刚软混杂机器人的迅速发展,其不仅在研究领域中成为热点,而且也在社会中逐渐占据着重要的经济地位。如果不能将现有两个平台的机器人工具链结合在一起,那么不仅会导致研究难以进行,同时也会浪费大量人力物力进行重复的程序开发,因此刚软混杂机器人仿真工作所存在的问题亟待解决。
本课题通过分别对主流的刚体和软体仿真方法和平台进行调研,对软体机器人的运动学、动力学进行分析与建模,并提出来了一种基于刚软耦合模型的仿真方法,并进行了物体抓取任务的仿真实验和实际样机验证实验。提出的该方法使得机器人研究者可以迅速方便地建立起刚软混杂机器人的仿真场景,并且能够充分利用刚体和软体现在的机器人工具链程序包,对刚软混杂机器人的仿真研究工作有着重要的意义,加速刚软混杂机器人的研究发展。
..........................
1.2 国内外相关技术发展现状
1.2.1 刚软混杂机器人的意义和发展现状
软体机器人目前是一个新型的机器人学科,拥有巨大的发展潜力,正在高速发展,并在越来越多的应用中发挥关键的作用。软体机器人与传统的刚性结构机器人有所不同。传统刚性结构机器人主要使用刚性的结构组件和刚性的驱动器,拥有结构简单、利于控制的特点,可以完成快速、准确、重复性高的动作任务。刚性机器人在工业生产中已经有大量的使用,例如汽车生产工业、数码产品组装行业等。但是刚性机器人的结构相对固定,往往只针对某一个固定任务,需要预先根据任务工作环境进行结构设计,不能对环境进行灵活的交互。对于不可预测的环境和高度复杂的环境,例如非工业化的自然环境、救援救灾环境、需要与人交互的环境,传统刚性机器人往往受限于自己缺少变化性的结构,导致无法发挥功能。
3.1 引言 · · · · · · · · · · · · · · · · · · · · 211.2.1 刚软混杂机器人的意义和发展现状
软体机器人目前是一个新型的机器人学科,拥有巨大的发展潜力,正在高速发展,并在越来越多的应用中发挥关键的作用。软体机器人与传统的刚性结构机器人有所不同。传统刚性结构机器人主要使用刚性的结构组件和刚性的驱动器,拥有结构简单、利于控制的特点,可以完成快速、准确、重复性高的动作任务。刚性机器人在工业生产中已经有大量的使用,例如汽车生产工业、数码产品组装行业等。但是刚性机器人的结构相对固定,往往只针对某一个固定任务,需要预先根据任务工作环境进行结构设计,不能对环境进行灵活的交互。对于不可预测的环境和高度复杂的环境,例如非工业化的自然环境、救援救灾环境、需要与人交互的环境,传统刚性机器人往往受限于自己缺少变化性的结构,导致无法发挥功能。
软体机器人的结构组成全部或者部分使用柔性的部件,比如使用柔性的材料作为主要的支撑结构,以及使用柔性驱动器作为动力来源,如Trivedi 等 (2008)的工作。通过利用这些柔性部件的高度灵活性、可变型性,软体机器人能够达到较大角度的弯曲,因此可以用于有限空间内的多种任务,达到模仿生物学的运动 (孟凡昌 等, 2018)。自身的结构可以连续变形,因此还可以使其形状适应环境,
在崎岖的地形上运动。或者利用柔顺性的运动来操纵不确定的目标对象物体,从而适应多种任务。同时,也能执行快速、敏捷的动作,如鱼的逃跑动作,虫的弹跳运动。
..........................
第 2 章 软体机器人运动学、动力学建模
2.1 引言
首先我们需要对整体机器人进行运动学和动力学分析与建模。正向运动学是通过机器人模型信息和当前的各关节变量来计算出计器人的姿态。而逆向运动学则是已知机器人模型信息和机器人末端的姿态,来反解出对应的机器人各关节变量。而动力学分析是指研究在动态的过程中,即考虑惯性项和时间项,分析机器人运动和受力之间的关系。
对于一个本文所研究的仿真工作来说,这两种分析是之后所有仿真方法研究的基础。由于刚性机器人的运动学和动力学的分析已经较为成熟的研究,在这里不再赘述,下面仅介绍主要的软体机器人的运动学和动力学建模方法。
对于软体机器人来说,因为其自身结构并不含有关节和连杆结构,而是连续变形体的结构,这给软体机器人的运动学和动力学理论分析建模带来了困难。在简单的情况下,可以使用一些近似的方法来得到简化的模型,从而进行理论分析。但是对于复杂的软体结构,通常数使数值分析方法。
..........................
..........................
第 2 章 软体机器人运动学、动力学建模
2.1 引言
首先我们需要对整体机器人进行运动学和动力学分析与建模。正向运动学是通过机器人模型信息和当前的各关节变量来计算出计器人的姿态。而逆向运动学则是已知机器人模型信息和机器人末端的姿态,来反解出对应的机器人各关节变量。而动力学分析是指研究在动态的过程中,即考虑惯性项和时间项,分析机器人运动和受力之间的关系。
对于一个本文所研究的仿真工作来说,这两种分析是之后所有仿真方法研究的基础。由于刚性机器人的运动学和动力学的分析已经较为成熟的研究,在这里不再赘述,下面仅介绍主要的软体机器人的运动学和动力学建模方法。
对于软体机器人来说,因为其自身结构并不含有关节和连杆结构,而是连续变形体的结构,这给软体机器人的运动学和动力学理论分析建模带来了困难。在简单的情况下,可以使用一些近似的方法来得到简化的模型,从而进行理论分析。但是对于复杂的软体结构,通常数使数值分析方法。
..........................
2.2 运动学建模
有许多研究者先对软体的生物进行了分析和建模来帮助理解软体的行为。Woods 等 (2008) 通过测量毛虫肌肉的信息得到肌电图,并对其进行运动学分析,得到动力学特性曲线。Mazzolai 等 (2007) 通过生物解剖的方法对章鱼触手的肌肉进行了分析,得到了对其运动相关的肌肉组织结构,并在实验中得到了相应的应变曲线。Yekutieli 等 (2007) 介绍了一种用于章鱼触手运动过程三维重建的半自动计算机系统。该系统使用两个摄像机来克服复杂光线条件下的非刚体运动提取的困难。
有许多研究者先对软体的生物进行了分析和建模来帮助理解软体的行为。Woods 等 (2008) 通过测量毛虫肌肉的信息得到肌电图,并对其进行运动学分析,得到动力学特性曲线。Mazzolai 等 (2007) 通过生物解剖的方法对章鱼触手的肌肉进行了分析,得到了对其运动相关的肌肉组织结构,并在实验中得到了相应的应变曲线。Yekutieli 等 (2007) 介绍了一种用于章鱼触手运动过程三维重建的半自动计算机系统。该系统使用两个摄像机来克服复杂光线条件下的非刚体运动提取的困难。
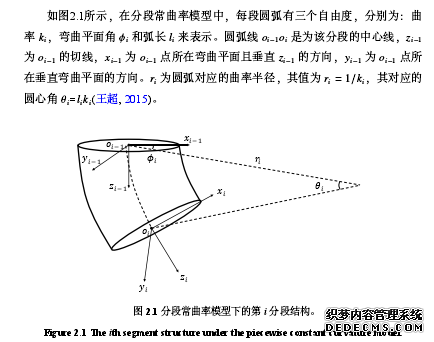
除了对生物进行研究外,还可以通过使用超冗余机器人的建模方法来对软体机器人进行建模。这是因为在对于精度要求不高,或者是实时性要求较高的时候,软体机器人的无限多个自由度的特性所带来的行为与超冗余机器人的行为较为相似。其理论基础是,通过将超冗余机器人视作很多个圆弧连杆连接而成的一个整体,然后使用分段常曲率连续体模型 (Webster III 和 Jones, 2010) 对整个机器人进行运动学建模。其中,每一个分段使用常曲率特性连续体模型来简化建模分析的过程。
定义 2.1. 弯曲平面角:是指在弯曲的圆弧所在的平面与 x 轴的夹角。
..........................
第 3 章 耦合仿真方法 · · · · · · · · · · · · · · · · 21
定义 2.1. 弯曲平面角:是指在弯曲的圆弧所在的平面与 x 轴的夹角。
..........................
第 3 章 耦合仿真方法 · · · · · · · · · · · · · · · · 21
3.2 刚软耦合的基本设计思想 · · · · · · · · · · · · · · · · · 21
3.3 刚软耦合模型的建立 · · · · · · · · · · · · · · · 23
第 4 章 实验及结果分析 · · · · · · · · · · · · · · 41
4.1 引言 · · · · · · · · · · · · · · · · · · 41
4.2 纯软体仿真实验· · · · · · · · · · · · · · 41
4.3 刚软混杂机器人仿真实验 · · · · · · · · · · · · · · 43
第 5 章 结论及展望 · · · · · · · · · · · · · 55
5.1 本文结论 · · · · · · · · · · · · · · · · · · · 55
5.2 未来展望 · · · · · · · · ·· · · · · · · 55
第 4 章 实验及结果分析
4.1 引言
为了验证本仿真方法有效性,本课题进行了多个实验:
1. 为了验证本课题的仿真方法能够在刚体动力学仿真器 GAZEBO 里对软体结构进行仿真,先进行了纯软体结构物体的摔落仿真实验;
2. 为了验证对于刚软混合机器人能够同时利用其刚体仿真平台和软体仿真平台的工具链,进行了刚软混杂机器人在特定场景特定任务下的仿真实验,也同时对刚软混杂机器人的控制算法进行了一定的研究;
3. 为了对比本课题的仿真方法的仿真效果,制作了实际样机并做了相同任务要求的实验,以对比仿真效果。
.....................
第 5 章 结论及展望
5.1 本文结论
本文通过前期调研,指出了目前刚软混杂机器人仿真领域存在着刚软机器人工具链不能同时使用的现状,使得研究工作存在一定困难。接着本文提出了一种新的仿真方法,该方法基于一种新的刚软耦合模型,可以将刚体仿真平台和软体仿真平台两者的底层物理模型耦合起来,实现两个仿真平台的相应的机器人工具链能够同时应用在一个刚软混杂机器人上。然后将该方法基于 ROS 系统进行了实现,使用了 GAZEBO 和 SOFA 这两个仿真平台。最后使用该方法进行了软体和刚软混杂机器人的仿真实验,以及制作了实际样机进行对比验证,证明了该仿真方法的有效性。#p#分页标题#e#
本文所提出的这一仿真方法主要贡献是使得刚软混杂机器人研究领域的研究者可以快速地搭建起一个能够同时利用刚、软两种机器人工具链的仿真平台,这对该领域的研究工作者有着重要的意义。
5.1 本文结论
本文通过前期调研,指出了目前刚软混杂机器人仿真领域存在着刚软机器人工具链不能同时使用的现状,使得研究工作存在一定困难。接着本文提出了一种新的仿真方法,该方法基于一种新的刚软耦合模型,可以将刚体仿真平台和软体仿真平台两者的底层物理模型耦合起来,实现两个仿真平台的相应的机器人工具链能够同时应用在一个刚软混杂机器人上。然后将该方法基于 ROS 系统进行了实现,使用了 GAZEBO 和 SOFA 这两个仿真平台。最后使用该方法进行了软体和刚软混杂机器人的仿真实验,以及制作了实际样机进行对比验证,证明了该仿真方法的有效性。#p#分页标题#e#
本文所提出的这一仿真方法主要贡献是使得刚软混杂机器人研究领域的研究者可以快速地搭建起一个能够同时利用刚、软两种机器人工具链的仿真平台,这对该领域的研究工作者有着重要的意义。
参考文献(略)

