本文是一篇计算机论文,计算机的应用在中国越来越普遍,改革开放以后,中国计算机用户的数量不断攀升,应用水平不断提高,特别是互联网、通信、多媒体等领域的应用取得了不错的成绩。(以上内容来自百度百科)今天为大家推荐一篇计算机论文,供大家参考。
第 1 章 绪论
1.1 研究背景与意义
自十九世纪末人类发明现代汽车以来,经过一个多世纪的发展,汽车已融入人们生活的诸多方面。汽车在给人们出行带来方便的同时,也带来了道路拥堵、交通事故和能源浪费等问题。伴随电子信息技术、自动控制技术和移动互联技术的快速发展,汽车也逐步向智能化和网联化方向迈进。如图 1.1 所示,以实现“人、车、路”高效协作为目标的智能交通系统(Intelligent Transportation System, ITS)能够实现相邻交通参与者之间实时动力学信息的交互,达到对车辆行驶状态进行实时、准确的控制,从而使车辆行驶的安全性和效率得到提高,有效改善了道路拥堵、交通事故和能源浪费等问题[1,2,3]。该系统的体系结构和部分应用如图 1.2 所示。ITS 的具体实施促使交通应用对联网和数据的需求激增,因此要求无线网络通信应具备更高的吞吐量和更低的时延特性。总之,信息在道路交通参与者间的有效共享和交互是实现 ITS 的首要前提。车联网满足了城市道路交通环境对安全、高效、智能的需求,该技术以车内网和车际网为基础,按照一定的通信协议标准,实现车与车,车与道路交通基础设施以及车与行人之间的无线互联和信息共享功能,是能够实现道路交通智能化、网联化的新型网络,是物联网技术在交通系统领域的典型应用。然而,车联网的应用环境存在车辆拓扑结构、密度频繁变化,无线通信易受电磁干扰影响的缺陷,上述缺陷导致了无线通信信号失真、通信时延和系统误码率高等问题,对保证通信和数据交互的准确性和实时性带来了极大的挑战。
.........
1.2 国内外研究现状
目前,关于车联网环境下的汽车协同驾驶技术的研究已取得了丰富成果,研究侧重点也各有不同,但是关于车联网中的专用短程通信技术,汽车辅助控制中的 CACC 技术和 CCA 技术等方面的研究却始终占据着最重要的部分。本章分别就这几个方面,对已有的研究进展和成果进行了回顾和总结,为本文其他章节的研究提供参考。DSRC 是一种高效的无线网络通信技术,能够在一定范围内支持高速移动物体之间的信息共享和交互[22]。西方发达国家关于 DSRC 协议的研究起步较早,其中以美国、欧洲和日本的协议标准最具代表性。主流的有美国的 ASTM/IEEE,欧洲的 CEN/TC278 和日本的 ARIBT75,它们之间的频谱结构各不相同,通信频段分别为 5.9GHz、5.8GHz 和700MHz。美国联邦通信委员会(Federal Communication Commission, FCC)于 1999 年制定了专门用于车路协同系统的 DSRC 标准,在 5.9GHz 中为其分配了 75MHz 频段用于通信,并采用时分多址与主动应答器方式作为通信协议。作为 WAVE 协议的前身,DSRC 协议由于与其他主流标准协议物理层不同,技术性能不占优,所以 IEEE 于 2004 年成立了802.11p 工作组,并着手制定 WAVE 协议。为使该协议能够适应高速移动的应用环境,IEEE 借鉴了 IEEE 802.11 协议标准,并于 2010 年 7 月正式发布了 IEEE 802.11p 协议标准 。 该协 议标 准 的物 理 层采 用了 正 交频 分 复用 (Orthogonal Frequency DivisionMultiplexing, OFDM)技术,逐渐形成了以 IEEE 802.11p 和 IEEE 1609 协议簇为基础的WAVE 标准。此外,由于最初 IEEE 仅在 802.11 协议标准框架内进行了简单修改,并未满足车联网环境下的具体应用,所以通过将原有802.11p涵盖的内容拆分为IEEE802.11p和 IEEE 1609 协议簇等两部分满足了实际需要[23]。
........
第 2 章 基于改进 NLMS 自适应滤波器的 DSRC 系统滤波时延补偿方法
2.1 引言
车联网能够实现相邻交通参与者之间实时动力学信息的交互,通过车辆控制层达到对车辆行驶状态进行实时、准确的控制,从而使车辆行驶的安全性和效率得到提高,有效改善了道路拥堵、交通事故和能源浪费等问题。目前,DSRC 系统由于具有成本低、易于部署等特点,已被广泛研究并逐步用于 V2V 和 V2I 通信。自适应滤波器由于能够在对信号和噪声的先验统计知识知之甚少的前提下,就能够通过简单的结构实现对自适应滤波系统参数的自动调整,从含有噪声的数据中提取感兴趣的、接近期望的信息,因此被广泛应用于信号处理[50]。关于 DSRC 技术的研究得到了学术界的充分重视,并取得了丰富的成果。目前,针对 DSRC 的研究主要集中在传统无线网络频谱对 DSRC 安全应用性能的影响[51]、DSRC车载网络广播安全关键应用机制[52]和 DSRC 无线传输性能等方面[53],但是对 DSRC 系统信号受电磁干扰影响失真的问题,以及 DSRC 通信信号由于降噪处理等因素造成的时延问题缺乏足够的研究。此外,针对提高 DSRC 系统通信质量的研究主要集中于 V2I 场景,对具有快速移动、快速连接/断开特点的 V2V 场景研究尚且不足[54,55]。
.........
2.2 专用短程通信(DSRC)协议
DSRC 协议是 ITS 中最重要的基础通信协议之一,是实现车联网无线通信的关键技术。该协议是一种基于射频识别(Radio FrequencyIdentification,RFID)技术的,以实现无线短程通信和保证信息安全可靠传输为目标的新兴通信技术。该协议支持点对点和点对多点的通信,并借助 5.8GHz 或 915MHz 无线电双向传输信息,实现车和道路交通基础设施的有机互联。目前,西方发达国家形成了以美国 ASTM/IEEE、欧洲 CEN/TC278 和日本ISO/TC204为主的标准化体系。我国于本世纪初正式颁布了GB/T20851-2007标准,推动了我国在该领域的发展。DSRC 技术在保证通信链路低时延,高可靠的前提下,能够实现高速的数据传输,可以在 V2V 之间,V2I 之间实现信息的共享和交互,是专门用于车联网的无线通信技术。由于该技术拥有较低的通信延迟和较高的传输速率,所以被广泛用于 ITS 的安全应用和电子收费系统等方面。DSRC 技术与 Wi-Fi 和蜂窝移动网络相比,在车联网应用方面具有很多的优点。虽然 DSRC 与 WiMAX 有着相似的功能,但是在资源开销和部署等方面有着 WiMAX 无可比拟的优势。表 2.1 比较了 DSRC 与 Wi-Fi、WiMAX 和蜂窝移动网络的各项指标。
........
第3 章 基于MU-MIMO 波束赋形的 WAVE 系统误码率优化方法....41
3.1 引言.......41
3.2 车载环境无线接入(WAVE).....42
3.3 IEEE802.11P与 IEEE802.11AC协议特性比较.........50
3.4 MU-MIMO 波束赋形在 WAVE 中的应用........54
3.5 实验与分析....61
3.6 本章小结........66
第 4 章 基于改进 CAS 算法的 CACC 系统控制性能优化.......69
4.1 引言.......69
4.2 协同自适应巡航控制(CACC)系统...........70
4.3 PID 控制器....72
4.4 改进的混沌蚁群(CAS)算法....74
4.5 基于改进 CAS 算法的 CACC 系统 PID 控制器优化方法.........78
4.6 实验与分析....81
4.7 本章小结........86
第 5 章 基于改进 PSO 算法的 CCA 系统控制性能优化..........87
5.1 引言.......87
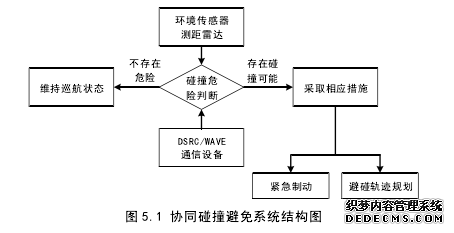
5.2 协同碰撞避免(CCA)系统........88
5.3 改进的粒子群(PSO)算法.........89
第 5 章 基于改进 PSO 算法的 CCA 系统控制性能优化
5.1 引言
随着汽车数量的飞速增长,交通事故也不断增加,研究提高行车安全的方法具有重要的意义。CA 系统作为一种能够减少交通事故发生的汽车主动安全技术,在减少前向碰撞和追尾事故中扮演着重要角色[123]。V2V 通信技术的产生使车辆间实时动力学数据的交互成为可能,将 V2V 技术与 CA 系统相结合产生的 CCA 系统,由于能够通过 V2V技术改善对危险探测的精度,所以可以有效提高 CA 系统的准确性[124]。由于 PID 控制器具有结构简单、工作可靠和调整方便的特点,将其引入 CCA 系统的控制层具有很强的实用性[125]。PID 控制器优化问题是一个典型的多目标优化问题,由于进化算法是具有高鲁棒性和广泛适用性特点的全局优化算法,所以将其应用于 PID 控制器参数整定能够有效提高优化效率。将 PID 控制器依据具体使用环境进行优化是研究的重点。CCA 技术作为一种能够辅助驾驶员有效避免碰撞事故发生的技术,已经成为汽车安全驾驶领域的研究热点,并取得了丰富的成果。目前,关于该技术的研究主要集中在传统 CA 技术与 CACC 技术的结合,以及针对城市道路特殊路况的汽车碰撞避免等方面,上述研究在 V2V 通信和多传感器信息融合的基础上,有效提高了碰撞避免的准确性[126,127,128]。虽然 CCA 系统的车辆碰撞避免与避碰路径规划功能已基本实现,但是对于车辆在实现上述功能时的稳定性、舒适性等方面的研究尚显不足。此外,针对引入 CCA系统控制层的 PID 控制器参数整定的研究,由于常用的遗传算法存在易早熟、稳定性差的缺陷,所以不能得到理想的 PID 控制器参数整定结果,影响了 CCA 系统控制层的控制性能。为解决上述问题,本章提出了基于改进 PSO 算法的 PID 控制器参数整定方法。从丰富粒子群多样性和避免算法陷入局部最优两方面出发,实现对 PSO 算法综合性能的提高。为了证明基于改进 PSO 算法的 PID 控制器参数整定方法,能够有效改善 CCA系统控制层的控制性能,本章分别对 PID 控制器参数整定前后的 CCA 系统控制层控制性能进行了测试。实验结果表明,上述方法能够有效提高 CCA 系统在实现碰撞避免功能时的稳定性和舒适性。#p#分页标题#e#
.......
总结
汽车在给人们出行带来方便的同时,也带来了道路拥堵、交通事故、能源浪费等问题。汽车协同驾驶系统能够实现相邻车辆之间实时动力学信息的交互,达到对车辆行驶状态进行实时、准确的控制,从而使车辆行驶的稳定性、安全性以及交通效率得到提高,有效解决上述问题。实现车辆协同驾驶系统高效工作的关键,一方面是车辆与周围交通环境的信息交互必须满足准确性和低时延的需求,另一方面是车辆控制层能够对车辆行驶状态实现精确、实时和稳定的控制。本文针对汽车协同驾驶技术的专用短程通信系统通讯质量和辅助控制系统控制性能两方面开展了研究。
⑴ 针对 DSRC 系统滤波时延补偿问题,提出了基于改进 NLMS 自适应滤波方法,解决DSRC 系统通信信号受技术本身缺陷和电磁干扰影响失真的问题。提出引入 DSRC 系统传输时延和自适应 FIR 滤波器单位延迟算子的时延补偿方法,解决系统时延造成的数据误差问题。本文在 CACC 典型工况仿真环境中对上述方法进行了测试,实验结果证明了上述方法在有效滤除 DSRC 系统信号噪声的同时,能够有效减少由于系统时延造成的数据误差。
⑵ 针对 WAVE 系统误码率优化问题,提出将 MU-MIMO 波束赋形技术应用于 WAVE 系统的方法,利用 MU-MIMO 波束赋形技术空间分集增益特性,解决了 WAVE 系统无线射频信号误码率较高的问题。利用 BD 预编码算法构建了 WAVE 系统波束赋形矩阵,并分别将 SVD 算法和 MMSE 检测技术应用于波束赋形矩阵的解矩阵。实验结果表明,上述方法能够有效降低系统误码率。
⑶ 针对目前引入 CACC 系统控制层的 PID 控制器参数整定不理想,导致系统控制性能欠佳的问题,提出基于改进 CAS 算法的 PID 控制器参数整定方法。利用信息素浓度因子,实现对CAS 算法收敛速度的提高,并将此改进算法应用于 PID 控制器参数整定,增加CACC 系统控制精度。本文在CACC 典型工况仿真环境中对上述方法进行了测试,实验结果表明,经过上述方法优化后的 CACC 系统控制层,能够在保证多车队列安全行驶的前提下,缩短最小安全距离,提高车辆行驶稳定性、舒适性和燃油经济性。
..........
参考文献(略)

