本文是一篇计算机论文,计算机操作系统的种类繁多,依其功能和特性分为分批处理操作系统、分时操作系统和实时操作系统等;依同时管理用户数的多少分为单用户操作系统和多用户操作系统;适合管理计算机网络环境的网络操作系统。(以上内容来自百度百科)今天为大家推荐一篇计算机论文,供大家参考。
第一章 绪论
1.1 研究背景
伴随着机器革命、电气革命、信息革命的到来,社会在发展的同时人口数目与人均资源需求也与日俱增。这加剧了人类对资源的开采与消耗,在不远的将来,地表的资源将无法满足人类社会发展的需求。因此蕴含丰富能源、矿产、生物等人类赖以生存资源的海洋越发吸引临海国家的目光。虽然人类在史前就开始在海洋上旅行、捕鱼、探索,但现如今人类对海洋,尤其是深海的认知仍处于初级阶段。为了加强对海洋的认知,自 20 世纪中叶开始,人类不断通过潜水器、机器人、科学勘探舰艇、人造卫星等手段对海洋进行探索。然而开展潜水器和水下机器人活动通常需要水面船只的支持,因此受天气及水面环境影响较大[1]。科学勘探舰艇和人造卫星对海洋的研究除受天气影响外造价也非常昂贵,不利于进行广泛的海洋探索。伴随着集成电路及传感器技术的发展,越来越多的油气公司、渔业公司、海军、海洋研究人员等通过部署传感器网络的方式采集海洋数据,继而使用多种数据分析的方式对这些数据进行处理来探索海洋的奥秘。但是这些探索一般相对分散且互相独立,此外还经常遵循传统的“部署、等待、取回、处理”的方式获取采集的数据。这种方式一方面不能及时收集和处理数据,另一方面,水下传感器的部署与回收也是非常困难的。因此这种传统的方法并不适合大规模海洋探索。现如今无需中间人工操作的,能够快速部署且带有定位功能的可通信水下传感器,可以实现长时间数据采集,并能够把数据通过网络传输到水面基站,进而转发到数据处理中心,成为了一种新的探索海洋的利器。由于通过有线连接每个水下传感器是不切实际的,因此把水下传感器节点组成无线传感器网络,通过网络间的无线链路传递收集数据的水下无线传感器网络(Underwater WirelessSensor Network,UWSN)成了一个新的研究热点。
........
2图 1.1 一个简单的 UWSN 网络
示意图[2]1.2 水下无线传感器网络如图 1.1 所示,UWSN 是一种特殊的无线传感器网络(Wireless SensorNetwork,WSN),一般由部署于水下各种深度的多种传感器节点、水面上的浮标、以及自主水下机器人(AutonomousUnderwaterVehicle, AUV)等设施组成。不同设备之间通过无线信道相互连接(主要为水声信道)进行数据交换与节点控制。传感器节点收集数据,并把数据传输到水面的浮标节点,由浮标节点通过无线电通信的方式将收集到的数据发往远端的数据处理中心。远程控制中心分析海洋数据,动态地根据应用需求及分析结果调整传感器节点的任务,并通过水面浮标把控制信息传递给水下传感器节点。由于水下环境的通信条件非常恶劣,在人类目前所熟知的无线通信媒介中,只有声学通信在水下具有较好的物理特性,能够长距离传播。尽管电磁波在陆上无线通信中占据主流地位,但电磁波信号在水下衰减非常严重,传播距离严重受限,即使在能见度较好的海水中,电磁波的有效传播距离也只有十几米,而在较为浑浊的海洋中,其信号的有效传播距离甚至不足一米[3],因而不适合在 UWSN中使用。水下光波通信的路径损失虽然没有电磁波大,但受散射影响严重,而且水下环境中存在大量障碍物,阴影效果也极大降低了它的可用性,也不适合长距离水下通信。因此,水声成为水下通信的主要方式,也是 UWSN 组网的重要信息载体。
........
第二章 UWSN 的时钟同步研究
无论在有线网络还是无线网络中,时钟同步都是非常重要的。在无线网络中,时钟同步是很多应用的前提,如节点定位、节能等。在节点定位中,被定位节点广播定位需求,锚节点收到定位请求后广播包含发送时间和位置信息的定位消息。当被定位节点接收定位消息后可以通过本地时钟和消息中的发送时间计算出消息的传播延迟,进而估算自己到该锚节点的距离。显然在这种定位方法中需要被定位节点和锚节点,以及锚节点之间的时钟同步。时钟同步也是节点节能的前提,只有时钟同步的节点之间可以周期性的进行休眠、唤醒操作,在唤醒阶段工作、通信,在休眠阶段节能。由于无线传感器节点大多使用电池供电,能量高效的协议是非常必要的。因而在 UWSN 中如何设计高效、节能的时钟同步方法是急需被解决的问题之一。
2.1 时钟同步原理
在每个计算机中都有一个物理时钟,该时钟一般通过统计时钟中晶体振荡的次数来感知时间的变化。运行在计算机上的软件通过访问物理时钟来获取时间信息。但由于晶体振荡的频率会随着温度、压力、湿度等因素发生变化,同时由于制造工艺的原因,两个晶体的振荡频率也不尽相同,因此两个物理时钟之间会发生时钟读数不一致现象。Ganeriwal 指出,相对于理想时钟,物理时钟的每秒偏移甚至可以达到 40 毫秒[26],并且随着时间的推移时钟偏移会不断累积。为了解决这一现象,人们设计了多种时钟同步协议,通过计算时钟之间的时钟偏差及偏移率,来不断调整时钟使时钟之间的偏差在一定范围内。定义 2.1 时钟偏差(clockoffset)。一个物理时钟相对于另一个物理时钟(一般用标准时钟)的时间差被叫做时钟偏差定义 2.2 时钟偏移率(clockskew)。本地时钟的晶振的振动频率与另外一个时钟的晶振频率(一般用标准时钟的晶振频率)之间的偏差被叫做时钟偏移率。
.......
2.2 相关工作
时钟同步协议按照是否需要一个外部时钟源分为外部时钟同步协议和内部时钟同步协议。所有的节点都与一个外部时钟源(如 GPS 时钟)进行同步的方法为外部时钟同步。所有的节点之间进行相互同步,但是不需要和一个外部时钟一致的方法为内部时钟同步。
2.2.1 有线网络时钟同步协议
网络时钟同步协议[24](NetworkTimeProtocol, NTP)是一个典型的外部时钟同步协议,被广泛应用于以太网中,能在高延迟的网络中稳定、高效的同步各个节点的时钟。NTP 通过一个长期的、双向的信息交换来估算时钟偏差和偏移率,并且通过不断地调整本地的时钟来同步本地时钟与一个外部时钟。虽然频繁通信及长时间在后台运行使得 NTP 能够提供一个低误差的节点间时钟同步(在最大轮询速率为 16s 时,能在一个小时左右把同步误差降低到 70us[29]),但也带来了巨大的能量消耗,这使得 NTP 不适合用于 WSN 中,更不适合用于 UWSN中。
........
第三章 水下 AUV 定位.............27
3.1 WSN 中节点定位原理......27
3.1.1 基本的测量方法........28
3.1.2 几何定位方法............29
3.2 现有的 AUV 定位方法及挑战............30
3.3AUV 在 UWSN 中定位....31
3.4 模拟实验.......39
3.5 本章小结.......43
第四章 AUV 编队的定位..........45
4.1AUV 集群定位与支配集............46
4.2AUV 信标节点选择算法............47
4.3 剩余 AUV 的重定位........54
4.4 模拟实验.......55
4.5 本章小结.......61
第五章 水下路由与数据收集....63
5.1 水下路由协议简介...........63
5.2 RECRP 路由协议....65
5.3 水下路由的模拟实验.......71
5.4AUV 辅助的水下数据收集........75
5.5AUV 辅助的数据收集模拟实验..........90
5.6 本章小结.......94
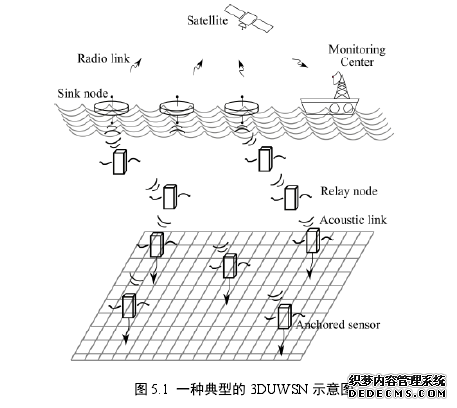
第五章 水下路由与数据收集
使用 UWSN 的一个比较主要的应用场景为水下监测,如科学勘探,海岸线保护和水下污染监测等任务,因此如何把水下传感器采集到的数据发送给数据中心是非常重要的。在本章中,我们介绍了一种用于实时数据传输的水下路由算法和一种通过 AUV 进行周期性收集水下数据的方法。
5.1 水下路由协议简介
图 5.1 展示了一个常用于水下监测的三维 UWSN。在该网络中传感器节点被部署在不同深度的水域,用来采集水下环境信息,并且直接或间接地(通过中继节点)把采集到的数据通过水声通信的方式传递给汇聚节点,汇聚节点再通过无线电磁通信的方式把汇聚的数据传送给监测中心。在这个过程中,水下路由协议对数据的传输起到了非常关键的支撑作用。由于传感器节点的能量限制,以及水声通信的高能耗,现有的水下路由协议大多为贪心算法,主要考虑提高数据包的送达率,减少通信能量消耗[81]。同时在水下路由中,经常会出现路由空洞的现象,路由空洞是指发送节点不能找到一个可行的路由线路把数据包传递给目的节点[82]。这种现象应该在路由协议设计时加以避免。在介绍我们提出的水下路由算法之前,我们首先回顾现有的能量高效的水下路由协议。能量高效的水下路由协议一般使用一些特殊的节点信息以减少水下节点的能耗[83],一般可以被分为以下三类:基于位置的路由协议,基于深度的路由协议,考虑路径消耗的路由协议。基于位置的路由协议一般假设每个节点都知道自己的位置信息,并且每个数据包中都包含着发送节点的位置信息。VBF[84]是一个基于向量的路由协议,在VBF 中,把从源节点到汇聚节点的向量作为虚拟链路,并且使用预先定义的传输半径来减少路由洪泛,达到提高能量效率的目的。但是在 VBF 中合理的定义传输半径较为困难,因此 VBF 在 UWSN 中很难进行实施。HH-VBF[85]是 VBF 的增强版本,在 HH-VBF 中,从源节点到汇聚节点的向量被一跳向量所代替。但是由于一跳向量在UWSN这种稀疏网络中效果较差,HH-VBF也存在很大的缺陷。AHH-VBF[86]是 HH-VBF 的改进版本,该算法通过自适应的更改传输半径和数据包的重传次数来提升传输的可靠性。但是由于每个数据包存在多个备份,因此AHH-VBF 同时增加了网络数据包的冲突概率和传输能耗。GRDAR[87]和 DCR[88]是两个典型的分布式拓扑控制协议,它们通过调整节点所在的位置来避免路由空洞。但是由于位置调节耗能较大,因此上述算法的能量效率并不高。在基于位置的路由协议中,每个节点都知道自己的位置信息这一假设在水下并不一定完全成立。因此基于位置的水下路由协议的应用场景存在很大的限制。#p#分页标题#e#
.......
总结
水声通信是水下传感器网络的主要通信媒介,由于水声通信的低带宽、高延迟、高错误率等因素,导致陆上的基于无线电通信的传感器网络技术很难移植到水下来。因此需要重新设计水下的时钟同步、节点定位和数据收集方式。本文针对水下特有的高延迟、节点带有移动性的水下网络设计了基于水声信道状态的时钟同步算法,实现了使用一次通信计算时钟间偏差量,两次通信计算时钟间偏移率。在过程中可以估算每条消息的传播延迟,因此能够克服高延迟以及节点移动性带来的时钟同步难题,无需进行大量的消息传递,节约了节点能源,能够在较短的时间内完成节点间的时钟同步,降低了网络中数据包冲突的概率,提升了网络性能。针对 AUV 定位问题,本文考虑了一种较为实际的场景,即 AUV 受洋流影响,且水下传感器网络的布局较为稀疏,不能满足同时至少三个节点能与 AUV通信。本文通过部署的传感器网络较为精准的估算洋流的速度,并通过多种方法来计算节点的移动速度,结合节点的速度估计和洋流信息,通过一个节点即可较为精准地定位移动 AUV。使得在洋流影响下的 AUV 可以通过稀疏布局的水下传感器网络进行定位。在 AUV 水下编队前往特定地点执行任务的场景中,由于洋流的影响,AUV编队可能偏离航向,因此需要周期性选择部分 AUV 上浮通过卫星进行定位,继而下潜对剩余节点进行定位,然后调整航向。本文设计了一种 AUV 信标节点选择方法,在保证定位精度的同时,减少上浮节点以节约 AUV 能量,并能够平衡AUV 之间的能量消耗,延长总体网络的生存周期。
..........
参考文献(略)

