本文是土木工程论文,本文以车载开关磁阻电机驱动系统为研究对象,主要研究转速调节器在驱动系统中的作用,分析转速调节器对整个系统稳定性的影响,并提出两种自适应转速调节器,结果显示具有自适应能力的转速调节器所构建的驱动系统在抗干扰能力上明显优于传统PI调节器,本文具体取得的学习成果总结如下:(1)通过控制功率变换器的导通关断来实现对开关磁阻电机转矩的控制,有效减小转矩脉动。直接瞬时转矩滞环控制器整定方便,实用性高。(2)构建转速-转矩双闭环系统,在不同工况下对电机进行仿真,分析得到转速调节器作为主调节器对开关磁阻电机驱动系统的稳定性起到关键作用。
.......
第1章绪论
本论文共包含七个章节,各章节具体内容和安排如下:第一章绪论主要对车载开关磁阻电机发展背景及研究意义进行概述,对开关磁阻电机的性能特点和基本结构进行了基本介绍,同时分析了开关磁阻电机及其驱动系统与其他电机相比所具有的优势,最后根据开关磁阻电机当前存在的问题确定以转速调节器为主要研究内容。第二章详细介绍了开关磁阻电机的基本构成和工作原理,并在此基础上对开关磁阻电机的数学模型、现今常用的建模方法和基本控制手段进行介绍。第三章分析开关磁阻电机产生转矩脉动的原因及常用的抑制方法,选定以直接瞬时转矩滞环控制方法抑制转矩脉动,并对直接瞬时转矩滞环控制原理加以分析阐述,利用MATLAB/Simulink仿真软件搭建相应模块,最后以6/4开关磁阻电机为研究对象,构建转速-转矩双闭环控制系统,在不同工况下观察其对转矩脉动抑制情况,同时跟CCC控制进行对比,观察转矩、转速波形及抗干扰性,并对结果进行分析。第四章介绍了两种开关磁阻电机自适应转速调节器的设计。运用MATLAB/Simulink仿真软件分别设计搭建模糊-自抗扰、单神经元PID转速调节器模块。
.........
第2章开关磁阻电机基本工作原理和数学模型
2.1开关磁阻电机驱动系统
在整个驱动系统中,开关磁阻电机为SRD的执行元件,实现了将电能转化为机械能的过程。功率变换器作为外部电源与电机的连接枢纽,是开关磁阻电机运行时能量的直接提供者,功率变换器中主要含有整流器和开关元件,合理的设计和控制功率变换器也可以提高SRD的性能。控制器则起到指挥与决策的作用,由图2-1可以看出,控制器将检测器中所监测到的转子位置、电流或速度反馈以及给定值进行综合分析处理,最终输出控制策略,实现对整个SRD的调控。位置检测器需对定、转子之间的相对位置和转子的速度进行检测,并及时上传至控制器中,通常情况位置检测器大多采用光电元件,霍尔元件等。电流检测器主要是对定子绕组电流进行检测,防止高电流对电机造成损害。分析了传统PID控制存在的局限性,首先提出一种模糊-自抗扰转速调节方法。自抗扰控制器具有抗干扰能力强等特点,将模糊控制运用到自抗扰控制器中,对其参数实现实时自整定,简化了自抗扰控制器部分参数整定复杂的问题,同时提高了自抗扰控制器自适应能力;其次,利用单神经元自学习,自整定的特定,与PID控制思想相结合,构建了时效性强,自适应能力好的单神经元PID转速调节器。
2.2SRM结构和运行原理
图2-3表示为一台三相6/4极开关磁阻电机横切面与B相电路的驱动原理示意图,从图中可以看出,定子上平均分布有6个磁极,且每个磁极上都绕有线圈(在此只画出B相上的线圈),转子上平均分布4个转子磁极且无线圈缠绕。S1,S2为电子开关,VD1,VD2为二极管,E为直流电源。当开关闭合,B相绕组通电,其余两相均不通电,此时电机内部建立沿BB’为轴的磁场,磁通经过定子轭、定子极、定转子间气隙、转子极、转子轭闭合,图示为转子处于B相对齐位置,此时转子达到稳定平衡。B相定子极与转子极呈现极对极状态,磁路磁阻最小,磁拉力消失,转子不在转动。为保持电机持续转动,此时应切断B相供电,给C相继续通电。此时,电机内部磁场沿顺时针方向旋转60°,于C相来说,定、转子轴并不重合,所以C相所产生的磁力线弯曲,此时磁路中的磁阻大于定、转子重合时的磁阻,则转子会受到气隙中弯曲磁力线中切向磁拉力继续转动,逆时针旋转30°,产生转矩,直至与C相定子轴重合,转子再次达到平衡位置。此时C相断电,A相通电,转子会重新转动至于A相磁轴重合,周而复始。
第3章开关磁阻电机直接瞬时转矩控制.............................................................................20
3.1SRM抑制转矩脉动的研究现状.............................................................................20
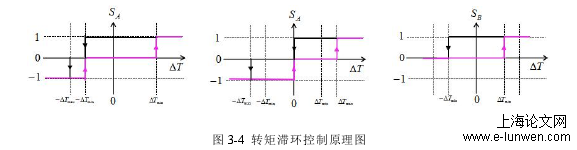
3.2直接瞬时转矩控制方法................................................................................................21
3.3开关磁阻电机直接瞬时转矩控制建模.........................................................................23
3.4仿真结果与分析.............................................................................................................27
3.5本章小结........................................................................................................................34
第4章开关磁阻电机自适应转速调节器设计.....................................................................35
4.1模糊-自抗扰的转速调节器...........................................................................................35
4.2单神经元PID转速调节器............................................................................................45
第5章开关磁阻电机驱动系统仿真及分析.........................................................................50
5.1控制系统搭建................................................................................................................50
5.2仿真与分析.....................................................................................................................51
............
第5章开关磁阻电机驱动系统仿真及分析
5.1控制系统搭建
现代控制理论着重强调“基于内部机理的描述方法”,是一种“白箱”控制方法,即以被控对象的数学模型为所研究问题出发点。现代控制理论的产生使被控系统中的许多基本特性明了清晰,同时也提供了很多的处理信号的新手段。然而“模型论”虽然在理论上严谨,但往往会陷入数学模型和线性思维的框架中。同时,又因实际工程问题上存在诸多不确定性,很难进行准确的模型建立,实际中很难广泛应用。针对上述传统PID控制方法和现代控制理论中存在的不足,中科院韩京清等学者希望在保留PID调节器与现代控制理论优点的同时,能解决上述所产生的问题,并给出了相应解决方法。首先,会根据控制目标和实际控制对象的承受能力先行合理安排过度过程;其次,合理提取“微分”;再次,是探讨合适的组合方式—应用非线性组合方式;最后为探讨扰动估计及补偿的方法—设计扩张状态观测器。将上述解决方法归类统一之后,提出了新型实用数字控制技术—自抗扰控制器(ActiveDisturbanceRejectionController,ADRC)技术。
5.2仿真与分析
从以上仿真试验分析,当使用自适应转速调节器时,开关磁阻电机系统在突加外部扰动的情况下,系统的抗干扰性更强,主要体现在转速波动和转矩脉动小,其中Fuzzy-ADRC-DITC控制系统在转速调节上表现出更强的优越性,其基本能实现无超调,无振荡。单神经元PID-DITC控制系统中,转矩脉动小,出现外部扰动时,能基本实现转矩无振荡,但对转速的调节稍显不足。本章主要针对提出的两个自适应转速调节器构建系统,分别在转速响应,转速突变,转矩突变情况下进行仿真对比。从仿真结果看出,两种自适应转速调节器能对给定快速响应的同时减少超调,当系统出现外部扰动时,由自适应转速调节器构建的开关磁阻电机驱动系统,在抗干扰方面存在明显优势,其系统抗干扰能力和鲁棒性更强。
..........
总结与展望
随着世界能源危机的加重和环保主义的呼声日益强烈,环境友好型新能源电动汽车应运而生。作为电动汽车的核心系统—电机驱动系统日益成为研究的热点。开关磁阻电机因结构简单,可靠性高,控制参数多等优点已逐步踏入新能源电动汽车领域。(3)提出两种转速自适应控制方法。首先,分析了自抗扰控制技术控制特点,结合开关磁阻电机自身性能,决定将自抗扰控制器用于转速控制。同时就自抗扰控制器参数多,整定难度大的问题,将模糊控制运用于参数整定,构成模糊-自抗扰转速调节器。其次,利用单神经元自学习、自整定的特点结合PID控制思想构建出单神经元PID调节器对转速进行调控。最后通过仿真分析得出自适应转速调节器对转速调节能实现响应速度快,超调量更小,同时能更好的应对系统出现的外部扰动,增强了系统的抗干扰能力和稳定性。(4)初步设计开关磁阻电机驱动系统,主要包括对控制芯片、整流电路、功率变换电路、驱动电路、电流检测进行初步设计和器件选型。
参考文献(略)
参考文献(略)

