本文是通信工程论文,本文以进行高速公路违章检测为目的,借助四旋翼无人机的灵活性和稳定性,设计了基于高速公路违章检测的四旋翼无人机平台,其主要的工作和贡献如下:(1)进行四旋翼无人机平台设计中的选型工作,并进行组装、调试,保证四旋翼无人机能够正常飞行,并且研究了四旋翼无人机的基本飞行原理,建立了四旋翼无人机的动力模型,研究了四旋翼无人机的姿态和位置控制原理和巡航飞行原理,并进行了巡航飞行实验。(2)通过串口实现了上位机JetsonTX2J120和四旋翼无人机之间的通信,并自定义违章信息主题topic实现违章信息的发布过程。通过自定义MAVlink消息,订阅µORB数据通道中的违章信息主题,获取违章信息数据,并将违章信息MAVlink消息发送至地面站。(4)为了保证四旋翼无人机在执行飞行任务时的安全,用HC_SR04超声波模块和ArduinoMega2560设计了低成本的避障系统,并且进行了避障实验,验证避障系统的可靠性,完成了四旋翼无人机避障功能的设计。
........
第一章绪论
高速公路管理部门主要是依靠视频系统人工监视或采用巡逻车流动巡逻的方式检测高速公路运行状况。但是在高速公路上安装视频监测设备,依靠人工监控的方式不能实时、有效地监视,也没有发现突发或有危险的事件的能力。巡逻车通常在指定的路线上进行巡逻,但是交通事故具有很大的不确定性,经常会出现巡逻车与交通事故擦肩而过的现象,降低了及时发现并排除事故隐患的可能性[2]。随着我国高速公路通车里程不断增大,高速公路内的车流量不断增加,运行机制的现代化对高速公路的管理水平提出了更高的要求。近年来,世界各国都加紧了对智能交通领域研究的步伐,在交通事件异常检测方面的研究也取得了突破性的进展。现在关于高速公路违章检测的研究,大多是在车辆违章监测的算法上做创新,提高了车辆违章监测的效率,没有对突发事件进行预判的能力。另外,现有的高速公路车辆违章检测技术都是基于固定式摄像设备平台,不能够进行实时监测,监控手段落后。所以,选用合适的平台搭载违章监测设备在高速公路上进行违章检测和巡逻是改善高速公路窘迫现状的关键。四旋翼无人机在高速公路上进行违章检测时可以达到几公里的距离,而传统的检测手段如果想要达到同样的效果,需要安装大量的监控设备,投入成本高。(2)监控面积广。四旋翼无人机可以同时检测上百米范围内的车道,而传统的监控设备只能监控某一区域的车辆。
.......
第二章四旋翼无人机平台设计方案
2.1四旋翼无人机平台设计需求分析
本文所设计的四旋翼无人机需要有两种基本的飞行模式,分别是手动遥控飞行和地面控制站控制自主飞行。手动控制是四旋翼无人机基础的飞行方式,可用于近距离的车辆违章检测,不仅仅适用于高速公路,也可以用于城市道路。在高速公路上通过四旋翼无人机进行远距离的违章检测,一般需要在地面控制站设置航点,通过对四旋翼无人机进行航线规划来实现。由于本文所设计的四旋翼无人机平台需要和搭载的机载计算机进行通信,因此所选择的飞行控制系统硬件要有多余的扩展接口,便于违章信息由上位机到四旋翼无人机之间的传递过程。然后本文所设计的四旋翼无人机平台需要能够和地面控制站进行通信,以实现违章信息在四旋翼无人机平台和地面控制站之间的转发,使高速公路管理人员能够及时查看车辆的违章信息,并采取相应的管理措施。近二十年来,四旋翼无人机凭借其成本低、结构简单、机动灵活、垂直起降等特点,在军事领域和民用领域都得到了广泛的应用。与传统的监控平台相比,四旋翼无人机具有很多优点:(1)投入成本低。
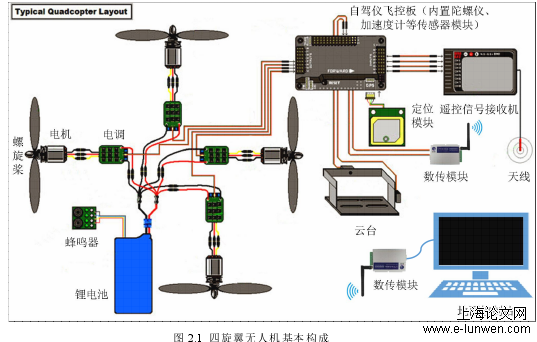
2.2四旋翼无人机平台的基本构成
四旋翼无人机的机械系统通常是指四旋翼无人机的机架部分,用来承载各种无人机的各种硬件设备。四旋翼无人机机架的好坏决定了其使用寿命的长短,四旋翼无人机的机架主要由中心板、力臂和脚架组成,结构较为简单。中心板用来承载无人机飞行控制系统和供电电池和其他的负载设备。力臂是四旋翼无人机在飞行过程中受力最大的部分,四个力臂以中心对称的方式固定在中心板上。脚架主要用来抬高机体跟地面之间的距离,可以避免地面积水对无人机的影响,同时可以为无人机在下降过程中提供缓冲作用,减小下降过程中产生的冲击力,也能够增大四旋翼无人机的安装空间,便于安装各种负载设备。四旋翼无人机的动力系统主要包括无刷电机、电子调速器(电调)、螺旋桨和锂电池[25]。其中无刷电机一般需要由直流电进行供电,然后通过无刷电调将直流电转化成三相交流电,使得无刷电机产生一个旋转磁场驱动转子转动。如果要改变无刷电机的转动方向,只需将三条电源线中的任意两条反接即可。
第三章四旋翼无人机平台通信方案设计..............................................................................................................37
3.1四旋翼无人机进程间通信方案设计.........................................................................................................37
3.2四旋翼无人机与地面站间通信方案设计.................................................................................................43
3.3本章小结.....................................................................................................................................................51
第四章四旋翼无人机平台收发违章信息方案设计与实现..................................................................................52
第四章四旋翼无人机平台收发违章信息方案设计与实现..................................................................................52
4.1物理层实现方式.........................................................................................................................................52
4.2串口通信功能实现.....................................................................................................................................53
4.3四旋翼无人机接收车辆违章信息..............................................................................................................53
第五章四旋翼无人机避障功能的设计与实现......................................................................................................61
5.1整体方案设计.............................................................................................................................................61
5.2硬件方案设计.............................................................................................................................................62
......
第五章四旋翼无人机避障功能的设计与实现
5.1整体方案设计
本文利用HC_SR04超声波测距模块和Arduino控制器组成避障系统,在无人机进行巡航飞行过程中,用超声波模块实时检测无人机的各个方向是否存在障碍物[72]。如果发现无人机的某个方向上存在障碍物,则避障系统会首先将无人机的飞行模式切换至定点模式,然后通过改变该方向上对应的信号通道值,并且将此时的通道值转化为标准的PWM信号输出到PPM编码器中,再由无人机的信号接收模块对接收到的PPM信号加以解析,由飞行控制系统控制无人机做出绕过障碍物的动作,从而实现巡航飞行过程中避障的目的[73]。在第二章中提到过无人机飞行控制系统中用不同的通道代表无人机不同的动作或功能,如横滚(Roll)、俯仰(Pitch)、油门(Throttle)和偏航(Yaw)是第一至第四通道,对应于无人机的左右、前后、上下和转向等动作。当无人机在巡航飞行过程中打开避障系统后,前后左右下等五个方向的HC_SR04超声波模块会实时检测各个方向上是否有障碍物(在高速公路上巡航飞行的话,上方是空旷的,因此本文不考虑该方向上的避障),如果检测到障碍物的话,避障系统会控制无人机绕过障碍物。例如,当超声波模块检测到前方存在障碍物时,避障系统会首先将控制无人机前后方向的通道值(第二通道)设置为1400(1500处于中立位置,无人机在前后方向上静止),然后将此通道的通道值转化为PWM信号输出到PPM编码器中,PPM编码器对接收到的信号处理之后会输出PPM信号到PIXHAWK无人机的信号接收模块。
5.2硬件方案设计
在无人机巡航飞行过程中由超声波传感器实时检测无人机与障碍物之间的距离,当无人机与障碍物之间的距离小于系统设置的安全距离时,由Arduino控制器首先将无人机飞行模式切换至定点模式(在巡航模式下,遥控信号不起作用),然后由控制器输出相应通道的PWM信号去控制无人机绕过障碍物[78]。例如,当无人机检测到前方有障碍物时,此时避障系统会通过Arduino控制器将此时对应通道的通道值转化为PWM信号,并且将此时的PWM信号通过数字I/O端口D9和D10发送给PPM编码器的通道2和通道3,如图3所示。从而控制无人机向后上方飞行,直至绕过障碍物。当无人机绕过障碍物之后会将无人机飞行模式切换到巡航模式。整个避障系统的控制流程图如图5-3所示:电子调速器简称电调,是无刷电机的驱动控制电路,电调可以通过将直流电源转为三相交流电,并且可以通过改变输出电压使电机产生不同的转速。螺旋桨是四旋翼无人机所必需的组件,它可以将电机的转动功率转化为四旋翼无人机的升力。
..........
第六章总结与展望
本文在整个四旋翼无人机平台的设计过程中,目的是为了能够在高速公路上进行车辆的违章检测,虽然取得了一些成果,但是由于时间、精力、成本等问题,加上在知识和经验方面还有所欠缺,所以在整个设计过程中还存在一些缺陷和不足有待改进和提高。为了应对目前汽车保有量快速增长、高速公路通车里程数的不断增加所带来的各种挑战,智能交通系统的概念应运而生。车辆违章检测的算法在不断创新,算法性能越来越强大,但是进行违章检测的设备却基本停留在利用固定式摄像设备的阶段,灵活性差、覆盖面积少、成本高。而随着技术的发展,四旋翼无人机凭借自身灵活性强、稳定可靠的特点,活跃于消费市场并被广泛应用于电力巡检、环境监测、三维绘图等领域。(1)本文在设计中因为需要搭载机载计算机进行实时的违章检测,考虑到机载计算机的功耗和重量,会削减四旋翼无人机的飞行能力。搭载机载计算机后,四旋翼无人机可能会由原来的三十分钟分行时长减少到二十分钟甚至十五分钟。所以未来寻求高品质的供电电池或者改变四旋翼无人机的供电方式,是需要进一步研究的。(2)本文在设计中采用的3DR数传模块的最大传输距离达到2公里,因此在高速公路上进行违章检测时只能在2公里范围内工作,若想要达到更大的检测范围,可使用巡逻车携带无人机进行高速公路违章检测,也可以采用4G、5G网络来完成无人机和地面站间的通信,从而极大地提高二者之间的通信距离。因此,增大高速公路违章检测的距离也是未来需要进一步研究的内容。
参考文献(略)
参考文献(略)

