本文是一篇硕士论文,硕士论文是攻读硕士学位研究生所撰写的论文。它应能反映出作者广泛而深入地掌握专业基础知识,具有独立进行科研的能力,对所研究的题目有新的独立见解,论文具有一定的深度和较好的科学价值,对本专业学术水平的提高有积极作用。(以上内容来自百度百科)今天为大家推荐一篇硕士论文,供大家参考。
1 引言
1.1 课题背景和意义
随着科学技术的提高和社会经济发展的需要,带动了机电一体化技术、新能源新材料技术、人工智能等技术的变革,这为机器人行业的发展注入了巨大的活力[1]。面对新形势、新需求,各种类型的机器人层出不穷,机器人的应用领域也不断在拓展。如加工制造行业的机械臂、焊接机器人、搬运机器人;医疗领域的手术机器人;航空航天领域的维护修复机器人、空间机器人;军事领域的侦察机器人、无人机轰炸机器人;勘探营救领域的管道机器人、水下机器人、搜捕机器人、排爆机器人;日常生活服务领域的烹饪机器人、扫地机器人、情感机器人、导游机器人、玩具机器人等各种不同种类的机器人系统。从上面的举例可以看出,机器人一般是为指定的任务和应用环境而设计的,其构型结构是固定的,对于不同类的任务和非结构化的应用环境,适应能力较差。因此,许多学者将模块化的概念引入到机器人的设计当中,提出模块化机器人这一理念。模块化机器人是由若干具有一定功能和结构的模块组成的机器人系统,它可以根据不同的任务和工作环境,改变模块间的组合方式,从而形成不同形态的机器人。相比于构型固定的机器人,模块化机器人的以其强大的变形能力和较强的环境适应性,可拓展机器人执行任务的种类,提高应对未知环境下的工作能力。模块化机器人分为两大分支,分别是可重构机器人和自重构机器人。可重构模块化机器人是由不同结构和功能的关节模块组成的机械臂,对它的研究侧重于分析其动力学和运动学的特征,从而执行精密的空间操作任务[2-3]。自重构机器人[4]的模块是机构、驱动、控制、通讯等高度集成的独立实体,每一个模块都具有运动能力,相比于可重构机器人,自重机器人的研究侧重点是针对不同工作环境的变形能力及其相关问题的研究。比如面对空间狭小的、狭窄的环境,模块可以串联组成蛇形机器人执行探险勘探等任务;面对凹凸不平的路面,模块可以组成四足机器人,提高行走的平衡性;面对坡度或平坦路面,模块可以首尾相连组成环形构型的机器人,从而提高行走速度[5]。上述的变形能力即是模块化机器人构型多样性特点的良好体现。除此之外,模块的均一性[6]特点为模块化机器人带来了良好的容错性和经济性,这是因为模块若发生故障,可由其它非故障模块代替工作,继续维持机器人的运行,同时相同的模块适用于批量化生产,可有效降低制作成本[7]。
............
1.2 模块化自重构机器人系统研究现状
1.2.1 自重构机器人模块
自重构机器人按照模块间的拓扑关系的不同可分为链式结构机器人、晶体式结构机器人以及混合式结构机器人[10]。链式机器人的特点是相邻模块首尾顺次连接组合,如蛇形构型模块化机器人、环形构型模块化机器人等,这种结构的机器人运动能力较好;晶体式机器人模块的组合方式类似于阵列式的结构,空间填充能力和重构能力较好;混合式结构的机器人则兼具链式和晶体式机器人的特点。CONRO[11-12]是 1988 年由美国南加州大学的沈为民等人研发的模块化机器人,模块形似长方体外形结构,具有两个自由度,单个模块由三部分组成,分别是头部部分、躯干部分以及尾部部分。头部与尾部为一对连接体,相邻模块的头部、尾部通过销孔式结构进行连接,躯干部分为驱动执行机构,图 1.1 展示了 CONRO模块及由此模块组成的不同形态的机器人。Ploybot 系列模块化机器人[13],[18],是由 Yim 开发的,伴随着 Yim 从博士研究生的学习到毕业工作(1994-2005),Ploybot 得到持续的升级改进,形成了多代不同系列的模块化机器人。不同系列模块的基本特征是相同的,即具有一个自由度,连接面的数量为 2,模块采用机械的锥孔式的连接机构。随着模块的升级改造,机身结构更加紧凑,通讯及控制能力更加强大。图 1.2 展示了 Ploybot 不同系列的模块及由此模块组成的机器人。
...........
2 模块化机器人系统设计
2.1 引言
进化机器人是受达尔文进化论的启发,将进化机制引入到机器人的设计过程中,在既定的任务下,根据预先定义好的一个或多个进化目标,使得机器人在与外部环境交互的过程中优胜劣汰自动的出现满足任务需求的性能优异的机器人个体。更形象的来说,进化机制(进化算法)类似于一个具有寻优功能的“黑箱子”,只需定义进化目标的适应度函数,将此函数值作为比较不同机器人个体性能的依据,就可以通过黑箱子自动产生性能优越的机器人个体。进化过程即黑箱子的寻优过程不受人为因素的影响,从而避免了不成熟的人为经验对进化过程的干预。进化机器人从早期的只对机器人的控制系统进化,发展到现在的可对机器人的形态和控制系统共同进化,这为解决既定的任务需求提供了更多的可参考的优秀机器人个体。综上可见,进化机器人简化了机器人系统的设计过程,具有较强的环境适应能力、鲁棒性和灵活性[108]。模块化机器人是多模块组成的复杂机器人系统,对它的控制和调试不仅要考虑到单个模块的运动性能, 还要考虑多模块之间相互协作的影响,所以设计一个性能优异的模块化机器人是一个非常复杂的过程。将进化算法与模块化机器人相结合,就可以根据既定的任务自动设计出性能优良的机器人,极大地简化了设计和调试机器人的难度。而且,模块化机器人可以为进化机器人的技术带来好处,因为模块间可以重新配置以形成特定的几何形态,提高了进化实验的效率。然而在目前现有的模块化机器人平台上,使用进化算法自动对模块化机器人的形态和控制参数进行设计时,进化后得到的机器人个体大多是在仿真环境中进行测试,而能移植到实体机器人上进行测试的还很少。原因是模块化机器人的控制参数和形态参数的移植过程还很复杂,无法根据仿真中得到的模块化机器人形态,快速在实体机器人上重现。在控制参数移植方面,由于硬件设计的封闭性以及代码函数库的非标准性,提高了其它研究人员编程、调试的难度。相比于控制参数的移植,对实体模块化机器人的形态参数的进化和测试涉及到更多方面的工作。(1)生产制作方面:机器人机械部分的配件如外壳等,需要找厂家进行开模定制,制作周期长且费用昂贵;(2)设计方面:机械式的连接机构设计复杂,自动连接器的设计增加了模块的能量消耗以及重量;(3)组装方面:机器人零部件、传感器、执行器的组装过程复杂且耗时。总之,模块化机器人的控制和形态参数的移植及测试需要大量的时间成本和耗材成本。
..........
2.2 模块的设计准则
为了减少模块化机器人的控制和形态参数移植的时间成本和耗材成本,对于面向快速测试进化形态的模块化机器人的设计准则,除了要具备结构简单,易于组装、快速稳定连接等特点,还要兼具开源式的特点,所以这种机器人系统的模块设计应满足以下条件:(1)模块可以组装成链式、晶体式以及混合式的模块化机器人,所以模块的连接面的数量至少是 3 个;(2)模块应具备规则的几何外形和对称的填充结构,确保模块化机器人在运动过程中的稳定性;(3)单个模块的自由度数量不宜过多,一个最佳,在确保机器人的运动能力的同时使得模块也具有简单的机械结构;(4)模块的尺寸、质量不宜过大且模块的外壳应具有一定的强度,确保机器人运动过程中的灵活性及稳定性;(5)模块应设计有快速的、简单的、可靠的连接机制,确保相邻模块之间快速的连接、断开,且无能量消耗,具备相邻模块间动力和信息的共享和传输的能力;(6)模块的机械部件可以使用快速原型技术如 3D 打印等进行制作,方便机械部件进行测试和调整,有利于减少加工成本;(7)模块结构应尽可能简单,易于组装,且组装所需器件易于购买,有利于减少模块的故障率,方便进行维护。同时有利于批量化制作,从而有效降低制造成本;(8)确保模块控制系统设计的可靠性、灵活性和控制友好性;(9)模块的机械设计、硬件电路设计和软件代码开源,方便任何人进行使用和修改;(10)模块应设计有传感器,具备对周围环境的感知能力,有利于提高机器人功能的丰富性、拓展执行任务的种类。
...........
3 模块化机器人的模块形态特性研究 ........... 37#p#分页标题#e#
3.1 引言............. 37
3.2 基于进化设计的模块形态的评估方法............ 38
3.3 进化实验..... 45
3.6 本章小结..... 54
4 模块化机器人的仿真与现实的可移植性研究...... 55
4.1 引言............. 55
4.2 “现实鸿沟”问题........... 56
4.3 适应度函数值与可移植性的权衡关系............ 57
4.4 代理模型与空间插值方法.......... 59
4.5 改进的反距离权重法....... 63
4.6 移植方法..... 69
4.7 本章小结..... 76
5 实验研究 ........... 77
5.1 引言............. 77
5.2 具有接近距离感知能力的模块化机器人实验系统.............. 77
5.3 模块连接机构的负载能力实验............. 78
5.4 典型构型运动实验........... 79
5.5 本章小节..... 95
5 实验研究
5.1 引言
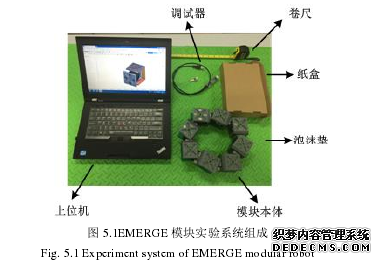
为验证模块结构设计的合理性,简单易用性,灵活性,在运动过程中的可靠性和稳定性,以及快速测试不同进化形态的能力,组建了以 PC 为上位机,以一定数量的模块所组成的模块化机器人为实验对象的实验系统,在不同的任务下,对不同构型的模块化机器人进行了实验测试。本章首先对模块的连接机构在不同情况下的负载能力进行了测试;然后对典型构型的模块化机器人进行构型组建实验和运动规划实验测试,包括环形构型、蠕动构型、蛇形构型、四足构型实验以及接近距离感知能力实验。其中上位机是实验系统的控制中枢,负责程序的编译、调试以及下载,进而根据不同的任务类型,控制相应的模块执行动作指令。在集中式的控制方式下,程序在上位机中运行,通过动力和信息线缆(三芯)给模块供电并进行数据信息通信。在分布式的控制方式下,上位机只是作为程序的开发环境并不是运行环境,程序是在各个模块中的微控制器独立运行,可根据接近距离传感器返回的距离值控制模块进行避障运动,因此只需为模块化机器人提供动力即可。实验环境配置工具包括线缆、标尺、泡沫垫、木板、负载物品、纸盒等,这些道具是为搭建典型构型的模块化机器人的运动性能实验环境的工具,用来更形象的说明不同构型的模块化机器人在不同环境下的运动能力。
........
结论
本课题在国家留学基金委的资助下,综合分析了国内外在自重构机器人模块、模块形态、“现实鸿沟”课题的研究成果,研制并提出一种新型的面向快速测试进化形态的模块化自重构机器人系统 EMERGE,并基于 EMERGE 机器人,开展了模块可变的连接面数量及其相对位置对模块化机器人性能的影响、代理模型、移植方法、运动规划等关键技术的研究,论文主要完成了以下几个方面的工作:
(1)研制一种新型的面向快速测试进化形态的模块化自重构机器人。首先分析面向快速测试进化形态的模块化自重构机器人的设计准则,并基于此准则开展对模块化自重构机器人模块的研制。首先基于一个自由度,对模块的连接面的数量、构型数量以及外形结构进行配置对比分析,确立了自由度及外形设计方案。通过对连接极性、负载能力以及动力和信息传输机制的分析,设计了可快速稳定连接且无能量消耗的磁式的连接机构。然后给出了模块组装的器件选型以及制作方法。模块应设计有距离传感器,具备对周围环境的感知能力,有利于提高机器人功能的丰富性、拓展执行任务的种类。最后基于模块的控制需求,设计了集中式和分布式两种方式的控制系统。
(2)研究模块可变的连接面的数量及其相对位置对模块化机器人性能的影响。以 EMERGE 机器人为研究对象,提出一种基于进化设计的模块化机器人模块形态的评估方法。分析了 Edhmor 系统的进化策略的不足,提出一种改进的具有重叠检测功能的进化策略,有效地剔除了发生模块重叠碰撞的机器人。然后选取模块连接面的数量及其相对位置作为模块的形态参数,并对模块形态进行分类描述分析。然后建立了 EMERGE 模块的仿真模型,设计了基于有向树的直接编码方式,并对其原理进行了分析说明,给出了基于移动任务的评估方式。通过仿真进化和实体机器人实验,并基于统计学分析,比较了不同模块形态下的性能,给出了最佳的模块形态以及由此模块所组建的最优性能的机器人。结果表明通过使用特定类型的模块形态,有助于提高获取性能优异的机器人形态的效率。此外,当为指定任务设计模块化机器人时,限制模块的连接面的数量也有助于缩小搜索空间的规模,从而在更短的计算时间内获取性能优异的模块化机器人。
..........
参考文献(略)

