1 章 绪论
1.1 研究背景
中国是四大文明古国之一,有记录的历史已达五千多年之久[1],经历几千多年的文明传承和发展,是当今世界文化保存和传播最为久远的国家。人类社会的发展是长期且螺旋向前的,各个阶段都有其鲜明的社会特色,农业社会是人类文明社会发展的一个重要阶段,具有里程碑式意义,古人通过观察气候、环境及野生植物生长繁殖的规律,掌握了果实与植物生长、发育的关系,于是进行人工栽培,从而发展出农业文明。其间,为了农业生产、食物储存和炊饮的便利,他们还创造了一些适合于农业生产的工具和食物存储器及炊饮器。新石器时代出现的主要标志为制陶术的发明、磨制石器的使用和原始农业、畜牧业和手工业的出现。考古研究证明,制陶技术的出现以及陶器的制造,对制造技术及工艺的发展都具有重大意义。泥土的易变性便于塑造出理想的形状,通过烧制既改变了泥土物质特性,又给生产、生活带来了便捷。陶器不仅可以作为果实存储的工具,它还可以丰富人们对食物的加工方式,在食物加工技术相对落后的古代,最早的常用的食物加工方式是用火直接烧烤,陶器出现后,又增加了蒸煮的方法[3]。因此,在陶器制作技术出现并发展之后,陶器逐渐成为社会生活与生产的必需品,它在生产生活中被作为炊饮器、盛食器、储藏器等其它用途被古人接受并广泛使用,对从事农业生产而逐渐定居的人群而言,陶器的出现,极大的丰富了其生活和生产的方式,成为生活中不可缺少的物品。先民们在生存发展中不断改进总结,因而器的制作技术水平和生产工艺在历史的进程中不断提高,在生活、农业生产中制作的多器物品被保留下来,供后人研究学习。陶器是新石器时代先民们常使用的工具之一,也是这一时期工艺技术水平进步最快的生活、生产手工制品。
新疆地处中亚,是人类活动最早的地方之一,也是农业文明和游牧文明发展的交叉区域,在秦汉以后,就纳入中华版图,为中华文明的发展做出重要的贡献。阿拉尔市地处新疆南疆塔克拉玛干沙漠西北边缘,从历史资料中得知,阿拉尔古称昆岗。从三河汇合口“肖夹克”可以看到,和田河、叶尔羌河、阿克苏河在这里汇合形成了塔里木河,塔里木河在历史上经历数次改道[5],当地先民们也逐水草而居,许多生活、生产中的遗迹在这里被留下,经历时代的演绎,许多遗迹被人们所发掘。昆岗墓葬就是在新疆阿拉尔市十一团境内的塔里木古河道发现的[6]。人类社会的演进史已经证明:农业是社会发展的基础。
..............................
3.1 点云数据配准概述及原理............................... 23新疆地处中亚,是人类活动最早的地方之一,也是农业文明和游牧文明发展的交叉区域,在秦汉以后,就纳入中华版图,为中华文明的发展做出重要的贡献。阿拉尔市地处新疆南疆塔克拉玛干沙漠西北边缘,从历史资料中得知,阿拉尔古称昆岗。从三河汇合口“肖夹克”可以看到,和田河、叶尔羌河、阿克苏河在这里汇合形成了塔里木河,塔里木河在历史上经历数次改道[5],当地先民们也逐水草而居,许多生活、生产中的遗迹在这里被留下,经历时代的演绎,许多遗迹被人们所发掘。昆岗墓葬就是在新疆阿拉尔市十一团境内的塔里木古河道发现的[6]。人类社会的演进史已经证明:农业是社会发展的基础。
..............................
1.2 研究意义
三维扫描技术因其强大的数据处理能力,已经在很多领域广泛运用,当然也包括各类古迹遗址的保护和开发应用。目前昆岗古人类遗址发掘出的陶器的数字化保护相对滞后,影响了昆岗文化的社会传播。在传统的测量技术中,获取陶器表面数据技术复杂,工作量大、精度不高,对于复杂且形状不规则的物体,其三维坐标信息的获取比较困难。因此,影响陶器三维模型重建和实物的数字还原。利用三维扫描技术对昆岗遗址陶器进行三维重建,可以解决以上问题,实现昆岗文化的最大传播,有利于阿拉尔(昆岗)区域农业的历史发展研究。同时对本地区农业、畜牧业的历史发展进行探索研究。三维扫描技术在昆岗遗址的陶器研究中有其独特的意义,
三维扫描技术因其强大的数据处理能力,已经在很多领域广泛运用,当然也包括各类古迹遗址的保护和开发应用。目前昆岗古人类遗址发掘出的陶器的数字化保护相对滞后,影响了昆岗文化的社会传播。在传统的测量技术中,获取陶器表面数据技术复杂,工作量大、精度不高,对于复杂且形状不规则的物体,其三维坐标信息的获取比较困难。因此,影响陶器三维模型重建和实物的数字还原。利用三维扫描技术对昆岗遗址陶器进行三维重建,可以解决以上问题,实现昆岗文化的最大传播,有利于阿拉尔(昆岗)区域农业的历史发展研究。同时对本地区农业、畜牧业的历史发展进行探索研究。三维扫描技术在昆岗遗址的陶器研究中有其独特的意义,
主要体现在以下几个方面:
2.1 结构光三维扫描技术的基本原理及误差分析
2.1.1 三维扫描仪分类
最近几年来,随着信息技术的不断进步,三维产业蓬勃发展。三维扫描、虚拟现实、增强现实、3D 打印等技术的不断成熟,推动着三维数据行业快速发展。三维扫描仪以获取点云速度快,精度高的优势,在目标物体由二维数据转换为三维数据的过程中被广泛应用,也是目前获取三维数据的主流技术之一。在科技快速发展的今天,三维扫描技术也得到快速发展,各种类型的三维扫描仪也随之问世。本节根据三维扫描仪构造及使用方法的不同,对其进行分类。
按照扫描仪获取点云的数据是否与目标物体接触,基本可以划分为两类,接触式扫描仪与非接触式扫描仪。
(1)接触式三维扫描仪
(1)通过三维扫描技术可以完整地获取陶器的点云数据,实现陶器三维数据的精确化扫描,为昆岗遗址陶器的数字化保护提供基础数据。
(2)通过三维扫描技术可以实现昆岗陶器的三维重建,将实物转换为数字化模型,可以很好地解决发掘与保护之间的现实矛盾,减少对文物的人为破坏,有利于对陶器的研究。
(3)可以将陶器转换成数字化模型,通过互联网以立体的视觉效果展示给公众,不但有利于昆岗文化的传播与交流,而且为南疆的农业与畜牧业的历史发展,探索提供一定的依据,同时也为陶器的数字化保护提供借鉴。
(2)通过三维扫描技术可以实现昆岗陶器的三维重建,将实物转换为数字化模型,可以很好地解决发掘与保护之间的现实矛盾,减少对文物的人为破坏,有利于对陶器的研究。
(3)可以将陶器转换成数字化模型,通过互联网以立体的视觉效果展示给公众,不但有利于昆岗文化的传播与交流,而且为南疆的农业与畜牧业的历史发展,探索提供一定的依据,同时也为陶器的数字化保护提供借鉴。
.............................
第 2 章 三维扫描技术2.1 结构光三维扫描技术的基本原理及误差分析
2.1.1 三维扫描仪分类
最近几年来,随着信息技术的不断进步,三维产业蓬勃发展。三维扫描、虚拟现实、增强现实、3D 打印等技术的不断成熟,推动着三维数据行业快速发展。三维扫描仪以获取点云速度快,精度高的优势,在目标物体由二维数据转换为三维数据的过程中被广泛应用,也是目前获取三维数据的主流技术之一。在科技快速发展的今天,三维扫描技术也得到快速发展,各种类型的三维扫描仪也随之问世。本节根据三维扫描仪构造及使用方法的不同,对其进行分类。
按照扫描仪获取点云的数据是否与目标物体接触,基本可以划分为两类,接触式扫描仪与非接触式扫描仪。
(1)接触式三维扫描仪
接触式测量系统典型代表主要是以三坐标测量机为代表的接触式测量系统。该设备主要优势为精度高,主要利用探头与被测物体表面接触式移动,可以获取被测点相对于坐标系原点的三维坐标,进而得到目标物精确的三维坐标,主要优点是测量精度高,测量范围广,不受物体表面纹理、受光照、等外界的干扰[27]。该技术也存在不足之处,因为是接触式测量,扫描时探头部位与被扫描物目标面紧密接触时,
由于挤压产生的压力可能会带来物体表面的特征的微小形变,目标物体表面容易被探头划伤,且不适合扫描软质物体,因为扫描数据慢,获取的数据量少,扫描时需要人为干预,因其缺点限制了该设备在三维测量领域的应用范围。
(2)非接触式三维扫描仪
非接触式三维扫描仪与被扫描的物体不需直接接触,就可获取到目标物体表面的三维数据。根据设备使用传感器原理的不同,又被分为激光、结构光等多种不同类型的三维扫描仪[28]。光学三维扫描仪的有操作方法简单,构造原理简单,在获取数据时精度高,对物体表面不造成伤害等优点。正式基于以上优点使得非接触三维扫描仪在许多领域广泛的被应用。当前最常使用的三维扫描仪有激光扫描仪和结构光扫描仪,这两类三维扫描技术是当今三维重建的主流技术。在三维建模中都能获得高精度的三维数据。
................................
2.2 Artec Eva 结构光三维扫描仪简介
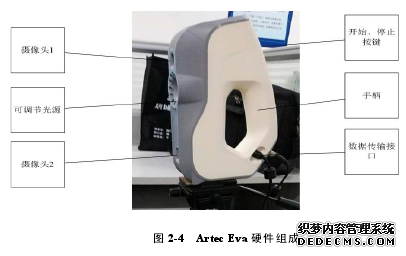
2.2.1 Artec Eva 硬件组成
Artec Eva 手持式扫描仪是美国阿泰克公司自主生产的一款手持式三维数据测量仪,结构轻巧携带方便。它的工作范围为 0.4m-1m,数据精度 0.1mm,表面颜色分辨率 130 万像素,光源为白色结构光,每秒获取次数 16 次每秒,三维数据获取速度为 280 万/S。高宽方向最小扫描范围 214x148 毫米,高宽方向最大扫描范围 536x371毫米。Artec Eva 手持式扫描仪具有便携性、操作性和高效率,主要由硬件构成如下:
..........................
第 3 章 点云数据配准应用概况...........................23
(2)非接触式三维扫描仪
非接触式三维扫描仪与被扫描的物体不需直接接触,就可获取到目标物体表面的三维数据。根据设备使用传感器原理的不同,又被分为激光、结构光等多种不同类型的三维扫描仪[28]。光学三维扫描仪的有操作方法简单,构造原理简单,在获取数据时精度高,对物体表面不造成伤害等优点。正式基于以上优点使得非接触三维扫描仪在许多领域广泛的被应用。当前最常使用的三维扫描仪有激光扫描仪和结构光扫描仪,这两类三维扫描技术是当今三维重建的主流技术。在三维建模中都能获得高精度的三维数据。
................................
2.2 Artec Eva 结构光三维扫描仪简介
2.2.1 Artec Eva 硬件组成
Artec Eva 手持式扫描仪是美国阿泰克公司自主生产的一款手持式三维数据测量仪,结构轻巧携带方便。它的工作范围为 0.4m-1m,数据精度 0.1mm,表面颜色分辨率 130 万像素,光源为白色结构光,每秒获取次数 16 次每秒,三维数据获取速度为 280 万/S。高宽方向最小扫描范围 214x148 毫米,高宽方向最大扫描范围 536x371毫米。Artec Eva 手持式扫描仪具有便携性、操作性和高效率,主要由硬件构成如下:
..........................
第 3 章 点云数据配准应用概况...........................23
3.1.1 点云配准概述.............................. 23
3.1.2 配准原理............................23
第 4 章 三维模型重建及分析........................... 30
4.1 三维据的获取.............................. 30
4.1.1 实验环境及配置................................30
4.1.2 旋转平台搭建.............................. 30
第 5 章 总结及展望.................................. 43
5.1 总结.................................... 43
5.2 展望.............................. 43
第 4 章 三维模型重建及分析
4.1 三维数据的获取
近年来,昆岗发掘出的陶器,如何将陶器既能完整的展现又能有效的保护,成为一个亟待解决的问题。本研究尝试借鉴国内其他地方文物保护的经验,通过三维重建的方式来解决这一问题。而用什么方法快速的获取陶器的三维模型,是本研究的关键所在。结构光扫描仪凭借出色的扫描速度、精度在陶器这类物品的三维重建得到广泛应用。本次实验获取三维数据使用的就是 Artec Eva 3D 扫描仪。获取三维数据的流程如下:
首先将准备好的陶器置于旋转平台上,再调整扫描仪与陶器之间距离,然后打开三维扫描仪采集数据。#p#分页标题#e#
4.1.1 实验环境及配置
实验平台配置:CPU 为 Intel(R) Core(TM)i7-2760QM 主频为 2.40GHz,内存为12GB,Windows 7 64 位操作系统图形工作站并安装配套的 Artec Studio 9 版本数据采集处理软件,工作站连接 Artec Eva 3D 扫描仪获取陶器的三维点云数据。在 CPU为 Intel(R)Core(TM)i5-5200U 主频 2.20GHz,内存为 4GB,Windows 7 64 位操作的计算机运用 MATLAB(2017b)进行仿真实验。
实验平台配置:CPU 为 Intel(R) Core(TM)i7-2760QM 主频为 2.40GHz,内存为12GB,Windows 7 64 位操作系统图形工作站并安装配套的 Artec Studio 9 版本数据采集处理软件,工作站连接 Artec Eva 3D 扫描仪获取陶器的三维点云数据。在 CPU为 Intel(R)Core(TM)i5-5200U 主频 2.20GHz,内存为 4GB,Windows 7 64 位操作的计算机运用 MATLAB(2017b)进行仿真实验。
.........................
5 章 总结及展望
5.1 总结
随着三维扫描技术的不断发展,在非接触扫描仪中目前主要的扫描仪是三维激光扫描仪和结构光三维扫描仪,二者都是三维扫描技术中常用的设备,两种设备的构成原理不同,各有优势。本文主要基于 Artec Eva 结构光三维扫描仪进行研究,在扫描陶器获得三维数据后,三维模型的精确度不够,本研究通过在 MATLAB 的程序、利用包围盒、ICP 算对点云数据进行配准,完成陶器的三维建模。主要工作如下:
(1)对三维扫描技术、结构光三维扫描仪在三维重建流程进行分析研究,还在实例中运用旋转平台完成了陶器的数字化三维建模。
(2)针对在三维建模软件中完成的三维数字化模型存在的数据不完整的情况进行分析,在 MATLAB 中编写的程序中利用包围盒、最近点迭代算法(ICP)对点云数据配准进行了优化。存在的缺点,对其算法进行改进。在配准过程中采用初始配准加精确配准的策略。包围盒主要是去除多余的点云数据,减少点云数据配准的工作量;在程序中调用 pcregrigid 函数对 ICP 算法进行优化,提高点云数据配准精度。
(3)通过在软件中将原始三维数据以 PLY 格式导出在 MATLAB 编写的程序中进行三维建模,通过实验数据对比在 MATLAB 中用包围盒和 ICP 算法进行点云数据的配准,不但配准速度也令人满意,而且拥有良好的配准精度。和原始的 ICP 算法对比,数据配准有了一定的提高,同时也提升配准效。
参考文献(略)
(2)针对在三维建模软件中完成的三维数字化模型存在的数据不完整的情况进行分析,在 MATLAB 中编写的程序中利用包围盒、最近点迭代算法(ICP)对点云数据配准进行了优化。存在的缺点,对其算法进行改进。在配准过程中采用初始配准加精确配准的策略。包围盒主要是去除多余的点云数据,减少点云数据配准的工作量;在程序中调用 pcregrigid 函数对 ICP 算法进行优化,提高点云数据配准精度。
(3)通过在软件中将原始三维数据以 PLY 格式导出在 MATLAB 编写的程序中进行三维建模,通过实验数据对比在 MATLAB 中用包围盒和 ICP 算法进行点云数据的配准,不但配准速度也令人满意,而且拥有良好的配准精度。和原始的 ICP 算法对比,数据配准有了一定的提高,同时也提升配准效。
参考文献(略)

