1 绪论
1.1 研究背景以及意义
中国是世界上竹资源赋存十分丰富、开发利用历史悠久的国家,被英国学者称为“竹子文明的国家”。在“中国十大竹乡”和主要竹产地,竹资源对当地的社会、经济、文化和旅游业具有重大影响。中国竹乡以及主要竹产地凭借得天独厚的竹资源优势,努力挖掘其深厚的文化底蕴,以竹文化为主题开展竹文化旅游,获得了较好的经济效益、社会效益和生态环境效益。
竹子,是一种可再生资源,生长一般 3 到 7 年,成材时间短;它可以用来编织各种生活用具,制做各种家具,可以用来造房子造纸,生产活性炭;竹可以用来提取竹叶黄酮,生产药品;竹笋可以食用,竹根可以用来雕刻艺术品,而毛竹是我国分布最广、面积最大的竹种,具有秆形通直、材性优良、速生丰产、用途广泛、再生能力强、经济价值高和可持续更新等特点。
目前传统的竹林采伐机械都无法实现竹根整株挖掘,在生产作业中存在下述问题也就显得尤为突出,即竹子砍伐后,竹根留在土壤中,一个竹根的直径约为 50-120 mm[12],浓密的根须占去直径为 0.5-0.7m 的圆形区域范围,腐烂的时间为 5-10 年[6]。如果不将竹根挖去,其所占据的土地资源就被浪费[17]。
目前市场上机械化自动化程度较高的联合伐木机适合地形开阔、树木间距大的乔木采伐,园林上用于树木移栽的挖树机结构庞大、需要较大的作业空间。由于可采伐的竹林大多分布在丘陵山地,竹子无序生长分布、竹子间株距、行距宽窄不一且需要根据生长情况间伐,机械化采伐作业相对困难。随着竹林规模化经营的发展和人力成本的提高,市场上非常需要可完成竹子整株采伐、适应性好、机械化程度高的竹木采伐机械。
.............................
1.2国内外研究动态
1.2.1国外研究动态
北美和北欧各国都是林业大国,也是林业机械最发达的国家,特别在木材生产领域,其机械化程度一直走在世界前列。20 世纪 60 年代后期,美国、瑞典、芬兰、加拿大和前苏联等都相继研制成了伐区作业联合机,经过 10 年的努力,这项技术才渐趋成熟。20 世纪 70 年代,各国纷纷研制出各种类型能完成两道工序的联合机,如伐木归堆机、伐木打枝机、伐木集材机和集材装车机等。20 世纪 80 年代初,联合机主要在北美、北欧和前苏联使用,到 80 年代末,这些国家在平原和缓坡林区森林采运全盘机械化作业比重已达 50%左右。
在竹林砍伐方面,北美和北欧的林业采伐机械一直走在世界前列。20 世纪 60 年代后期,美国、瑞典、芬兰、加拿大和前苏联等都相继研制成了伐区作业联合机,经过 10 年的努力,各国纷纷研制出各种类型能完成两道工序的联合机,如伐木归堆机、伐木打枝机、伐木集材机和集材装车机等。20 世纪 80 年代初,联合机主要在北美、北欧和前苏联使用,到 80 年代末,这些国家在平原和缓坡林区森林采运全盘机械化作业比重已达 50%左右。20 世纪 90 年代,适合于日本林业的联合机得到迅速发展。1995 年芬兰 Plustsh 公司推出步行式采伐机器人样机;1997 年 Timberjack 公司又开发出了新一轮更为完善的机器人样机,并用于陡坡和松软地的采伐作业。该机在正常行走速度下用 6 条腿步行,根据不同地形也可用 3 或 5 条腿移动和保持平衡;机上装有先进的控制系统通过计算机和传感器可按地面的不平度和坡度调节行走步伐,并可跨越 120cm 高的障碍;该机只用一个操纵杆即可控制运动方向和调节运动速度,工作装置可按设定的程序自动进行伐木、打枝和造材。
............................
2.履带式液压竹木连根整株采伐挖掘机主体设计方案的确定
2.1 履带式液压竹木连根整株采伐挖掘机的设计要求
该机的总体方案应本着简单、合理、经济的三项基本原则,将采伐机的各个零部件按照各自的功能装配在一起,并形成有机的整体,使其达到预期的工作要求,竹木连根采伐机设计的重点在于动力系统、行走装置、采伐机构完整的结合在一起,使其能够平稳高效的工作,能够实现设计的基本要求[18-19]。
竹木连根采伐挖掘机经多个零、部件按照相一定的装配关系组成整体,并且各个单元都有确定的位置关系和尺寸关联,如何合理设计该机的总体结构形式,各个零部件之间的运动过程与位置关系显得十分重要,因此履带式竹木连根采伐挖掘机的总体布局应该满足以下条件[33]:
2.1 履带式液压竹木连根整株采伐挖掘机的设计要求
该机的总体方案应本着简单、合理、经济的三项基本原则,将采伐机的各个零部件按照各自的功能装配在一起,并形成有机的整体,使其达到预期的工作要求,竹木连根采伐机设计的重点在于动力系统、行走装置、采伐机构完整的结合在一起,使其能够平稳高效的工作,能够实现设计的基本要求[18-19]。
竹木连根采伐挖掘机经多个零、部件按照相一定的装配关系组成整体,并且各个单元都有确定的位置关系和尺寸关联,如何合理设计该机的总体结构形式,各个零部件之间的运动过程与位置关系显得十分重要,因此履带式竹木连根采伐挖掘机的总体布局应该满足以下条件[33]:
(1)须保证整机能在山地崎岖、松软、泥泞等恶劣路面行走,且具备一定的爬坡能力和良好的越野性能,以保证整机能够顺利进入林间。
(2)确保整机在工作过程中,采挖装置的操作简单和安全性能。
(3)整机满足操作简单、结构合理、工作可靠。
(4)整机体积小、重量轻、成本低。
.........................
2.2 履带式液压竹木连根整株采伐挖掘机整体方案确定
2.2.1 毛竹种植农艺要求
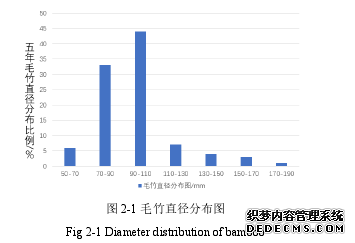
毛竹的种植模以每亩种植 22-33 株为宜,株行距可选择 5×6 米或 4×5 米,穴的规格为长 1.5 米、宽 0.8 米、高为 0.6 米,挖穴时穴的长边应与等高线平行。而且毛竹的直径基本上都是小于 190mm 的,其中以直径 90-110mm 之间的毛竹所占比例最大[16],毛竹竹鞭在 15-40cm 范围之内[20]。
..........................
3.1 液压系统原理设计 ............................ 24(2)确保整机在工作过程中,采挖装置的操作简单和安全性能。
(3)整机满足操作简单、结构合理、工作可靠。
(4)整机体积小、重量轻、成本低。
.........................
2.2 履带式液压竹木连根整株采伐挖掘机整体方案确定
2.2.1 毛竹种植农艺要求
毛竹的种植模以每亩种植 22-33 株为宜,株行距可选择 5×6 米或 4×5 米,穴的规格为长 1.5 米、宽 0.8 米、高为 0.6 米,挖穴时穴的长边应与等高线平行。而且毛竹的直径基本上都是小于 190mm 的,其中以直径 90-110mm 之间的毛竹所占比例最大[16],毛竹竹鞭在 15-40cm 范围之内[20]。
..........................
3.液压系统的设计 ............................ 24
3.1.1 液压系统原理拟定 .......................... 24
3.1.2 液压系统方案的确定 ......................... 24
4.主要装置结构设计以及有限元分析 ..................................... 36
4.1 采挖机的工作原理与过程 .......................... 36
4.2 采挖支架的设计 .................................. 38
4.3 驱动系统的结构设计 ........................... 40
5.样机制作与试验 ........................... 57
5.1 样机的制作 .................................. 57
5.2 样机的试验与问题分析 .......................... 58
5.2.1 样机试验效果 ................................ 58
5.2.2 问题分析 ..................... 58
5.样机制作与试验
5.1 样机的制作
根据以上对竹木连根整株采伐挖掘的介绍以及分析,在浙江省临安市某工厂进行加工出样机如下如所示,整机的参数如下表所示。

...........................
6.总结与展望
6.1 总结
本论文基于丘陵山地竹林机械化经营对毛竹采伐装备的实际需求,通过对现有竹木采伐以及竹根挖掘技术的深入研究,提出了竹木连根整株挖掘采伐的技术方案并完成了样机的三维设计、研制及性能试验,论文所进行的研究对解决毛竹采伐之后竹蔸残留问题、提高毛竹采伐效率等具有重要实用价值和推广应用前景。 该论文主要工作和创新点:
(1)首先通过查找相关文献,了解国内外地区对竹木进行采伐之后所遗留的竹根问题并没有进行相关成熟的理论和机器。具有一定创新性和推广性。
(2)基于全液压遥控履带行走底盘,研制开发了竹木连根整株挖掘采伐机,完成了样机的三维设计、研制及性能试验,通过对曲柄连杆圆周摇摆式采挖机构的静力学和动力学仿真及性能试验,对样机采挖关键部件进行了结构优化,并完成了整机液压传动系统、电控系统的设计及试验。
(3)创新点 1:研发了全液压竹木连根整株挖掘采伐机,通过设计的曲柄连杆圆周摇摆式采挖机构完成了竹木的连根采挖,实现了竹木采伐过程中在地下不残留竹蔸、树根的目的。
(4)创新点 2:所设计的竹木连根整株挖掘采伐机,通过采挖头开合油缸伸出位置的控制,可适应不同直径的竹木采伐,所设计的夹持装置可实现竹木采伐后的夹持升降和运输。
参考文献(略)

