本文是机械工程论文,本文针对丰满发电厂坝顶门机的传统定位方式,设计了门机自动行走位置控制系统的方案,采用激光测距仪及RFID射频识别技术作为位置检测,以PLC作为核心控制器,结合模糊控制算法实现对门机的速度控制,进而实现门机的位置控制。使用WinCCFlexible平台设计了门机位置控制系统的人机界面,操作界面具有良好的人机交互性。论文做了如下工作:(1)利用MATLAB软件中的Simulink模块对设计的门机自动行走位置控制系统模糊控制器进行仿真,仿真结果表明所设计的模糊控制系统可根据门机位置变化做出快速反应,实现对门机行走速度的稳定调节;(4)开发了门机行走位置控制程序,完成了模糊控制算法的PLC程序实现,又以WinCCFlexible为平台设计了门机自动行走位置控制系统的人机界面,操作界面具有良好的人机交互性和操作导向性。这种定位方式要求操作人员注意力高度集中并且必须具有丰富的操作经验,才能准确的对门机定位,所以这种定位方式效率显然不高。现场实践表明,即使调配经验丰富、技术娴熟的操作人员,完成一次启闭闸门工作也需要对门机位置进行多次调整,而且动作慢,工作效率低。整体来看,这种大多数发电厂都在采用的门机定位方式,需要操作人员的工作素质较高,且需要其他工作人员指挥配合,浪费劳动资源并增加了生产成本的同时与电厂整体自动化水平不协调。
.....
1绪论
近年来,随着工程建设的快速推进,各项建设项目取得了不错的成绩。水利工程建设在许多方面与我国的发展有关,代表了我国的经济、农业以及社会的发展,对促进国民经济具有重要意义。水利设备在水利工程中有着重要作用,它对水利工程的建设及后期运行都有影响。其中,水工闸门及门式起重机(门机)就是重要的水利设备,在水利工程中扮演着极其重要的角色[2]。水工闸门作为水工建筑的重要组成部分,其作用为控制水流输送,控制水位及调节流量[3],在防洪工程与灌溉工程中起到重要的作用。发电厂大坝更是少不了水工闸门这种设备,能否准确且快速启闭,是影响发电厂效益的重要因素之一,也影响着大坝的健康状态。门式起重机,作为吊运水工闸门(泄洪闸门、检修闸门、快速闸门)的重要设备,其能否在最短时间内到达目标位置并完成定位要求,且将闸门快速吊起,这直接影响发电厂生产效率,更关系到上级调度命令能否顺利有效执行。传统的门机定位精度差,运行效率低,其主要原因是传统的门式起重机定位方式是门机司机目测且需要地面工作人员配合,来判确定门机当前所在的位置。操作人员手动操作门机到达水工闸门大概位置后,在地面人员的指挥下,通过手动微调门机位置来实现准确定位。在一般情况下,门机司机室距地面的高度至少为15米,这样的高度下,门机操作人员与地面人员沟通困难。
.....
2门式起重机自动行走位置控制系统总体设计
2.1工程背景
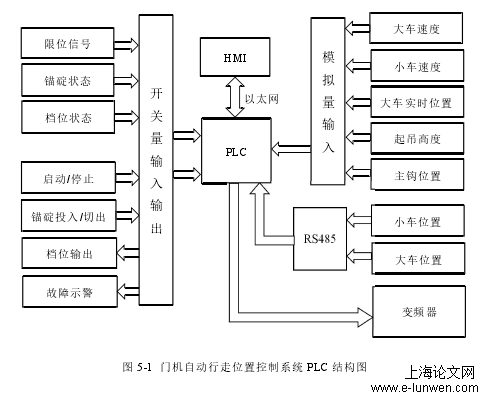
门机的主起升机构主要由电动机、联轴器、平衡滑轮装置、安全制动器、减速器、左/右卷筒装置及吊钩等组成,如图2-4为丰满发电k2012502kNN双向门机主起升机构。门机主起升机构为双吊点,驱动方式采用分散式,传动方式为全封闭齿轮传动,选用卧式、大速比硬齿面减速器作为门机起升机构减速器,卷筒通过联轴器与减速器的输出连接。全封闭式传动具有效率高、结构紧凑、安装简单等特点。运行时产生的声音分贝更低、自重更小,能够保证主起升机构起吊重物时的平稳性以及可靠性。在门机行走位置自动控制系统中,操作人员通过布置在中控台上的HMI进行门机行走目标位置选择,HMI通过通讯协议将信息传给PLC,位置检测系统(激光测距仪及RDID读卡器)能自动识别门机当前位置,并将大车当前位置信息传送给PLC,PLC经过计算得到将要行走的距离后发出命令,大车行走机构开始向目标位置行走。自动行走位置控制系统的主要作用是对门机大车和小车进行定位,也就是对起升装置的主钩进行二维平面定位,即在XOY面进行定位。
2.2门式起重机运行及操作方式
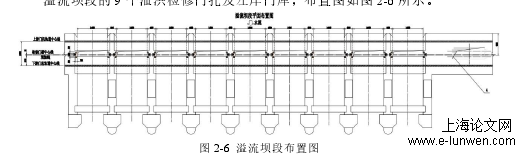
门机运行时,操作人员操作门机走到目标位置。具体操作为:司机操作挡杆进行门机大车档位升降,将要到达目标位置时由下面指挥人员发出指令,司机以低档位操作对门机位置进行调整,最终完成操作。例如:门机从左门库位置到溢流1#门孔,司机先向右扳动大车行走档杆将其升到1档,几秒钟后升到2档再过几秒(待门机稳定运行)升到3档位,门机匀速行走一段距离,当门机与溢流1#门孔接近时,降回到1档位,此时听下面人员指挥落钩,然后观察落钩位置再移动小车实现对主钩上的吊梁进行调整,最后完成此次门机运行操作。为了快速且准确的获取大车/小车行走机构的当前位置坐标,进而使门机操作人员对其进行精准位置控制,在该位置控制系统中,将激光测距仪作为位置检测器安装在大车行走机构上,用于大车在X方向行走的距离检测,同时辅以RFID射频识别技术,即沿大车行走轨道两侧适当位置铺设射频卡,在大车到达目标位置时RFID读卡器读取目标位置的射频卡,实现对大车行走机构停车保护;由于小车行走距离较短,且行走速度相对较低,所以小车只采用RFID定位方式。对门机运行目标位置的布置进行分析可知门机在左门库、右门库、溢流坝检修门孔及发电机检修闸门孔之间作业,且门机每次运行距离为已知量,门机大/小车最大运行速度为3.0sm。
3门机行走过程速度曲线的确定.................................................................................20
3.1梯形速度曲线..................................................................................................20
3.2指数型速度曲线..............................................................................................21
3.3S型速度曲线....................................................................................................22
3.4过程曲线确定..................................................................................................24
3.5本章小结..........................................................................................................25
4门式起重机位置控制模糊策略.................................................................................26
4.1PID控制理论....................................................................................................26
4.2模糊及模糊PID控制......................................................................................28
4.3模糊及模糊PID控制器设计..........................................................................32
4.4门机位置模糊控制系统仿真..........................................................................44
4.5本章小结..........................................................................................................50
5门式起重机自动行走位置控制系统工程实现.........................................................51
5.1PLC逻辑控制系统设计...................................................................................51
5.2HMI控制界面组态..........................................................................................57
3.1梯形速度曲线..................................................................................................20
3.2指数型速度曲线..............................................................................................21
3.3S型速度曲线....................................................................................................22
3.4过程曲线确定..................................................................................................24
3.5本章小结..........................................................................................................25
4门式起重机位置控制模糊策略.................................................................................26
4.1PID控制理论....................................................................................................26
4.2模糊及模糊PID控制......................................................................................28
4.3模糊及模糊PID控制器设计..........................................................................32
4.4门机位置模糊控制系统仿真..........................................................................44
4.5本章小结..........................................................................................................50
5门式起重机自动行走位置控制系统工程实现.........................................................51
5.1PLC逻辑控制系统设计...................................................................................51
5.2HMI控制界面组态..........................................................................................57
.....
5门式起重机自动行走位置控制系统工程实现
5.1PLC逻辑控制系统设计
门机大车行走机构一般在两种工况下运行,即空载(空钩工况)、负载(吊闸门工况),门机大车的最大速度为/0.3sm,空载工况下门机大车达到最大速度所行走的距离与负载工况下不同,故在制定方案时应考虑门机在这两种工况的不同控制情况。门机大车自动行走位置控制系统布置的是两套检测装置,激光检测仪及RFID射频读卡器。激光检测仪用来实时检测大车位置并将数据传送给PLC,当检测到减速点时门机开始减速直至大车停车;RFID读卡器读取布置在各个目标位置的射频卡从而实现大车位置的校核。门机大车控制流程图如图5-3所示。门机小车行走控制流程与大车略有不同,因为小车行走机构选取的位置检测方案不同于大车,小车行走机构采用的是2个RFID射频读卡器,分别布置在小车架的两侧,一个读卡器用于读取空载工况的位置信息,另一个读取负载工况的位置信息。读卡器的布置如图5-4所示。WINCC软件中创建了丰满门机自动行走位置控制系统的登录画面、控制过程画面及操作记录画面,实现了对门机空载/负载选择、定位的一键操作及故障复位等功能,并能够完成报警记录及历史查询。
5.2HMI控制界面组态
HMI——人机接口,也称人机界面。目前常用的人机交接口主要包括西门子工控的博图WinCCHMI系统、KINCO步科触摸屏人机接口等。本系统采用西门子系列PLC作为控制器,考虑到硬件系统兼容性及组态的难易程度等因素,本系统选用西门子公司的Smartline1000IEV3面板。HMI的设计是基于WinCC组态软件完成的。WinCC组态软件是西门子公司推出高效率的HMI编辑系统,它提供适用于大多数工业环境的画面显示、信息分类及操作记录等功能模板,通过该组态软件可使控制过程变为可视,同时该软件还提供给程序员开发用户画面的环境[55]。WinCC组态软件具有较好的便利性和灵活性,STEP7编程中的变量表在与WinCC连接后可直接导入。利用WinCC组态软件可以准确地掌握门机自动控制系统的运行状况,有助于顺利完成控制操作。门机属于特殊机械,一般需要持证上岗。为保证设备安全应为门机操作系统设置登录密码,以免非操作人员误操作。开机后操作人员输入密码验证成功后进入操作界面。密码一般可选两种设置方式一种是在PLC程序中设置密码,另一种是在Wincc组态软件中设置密码,本文选用后者来实现密码设定,如图5-9所示,操作人员点击登录按钮,操作人员在弹出的登录界面输入用户名及密码后进入操作系统。登录成功后进入主界面,通过主画面可以控制门机的启停、对门机目标位置进行选择及查看系统运行状态。如图5-10所示。使用面板来同步PLC时间,需要用到区域指针中的相应功能,在连接的“区域指针”的选项下激活“日期/时间”和“作业邮箱”,并配置相应地址参数。Byte类型变量分别用来显示PLC同步后的时间。在主界面中创建十六进制格式样式为“FF”的IO域用来显示同步后的PLC时钟。
......
6结论与展望
介绍了现场安装与调试过程,调试表明,设计的门机自动行走位置模糊控制系统,位置控制精度在允许偏差范围内,能够满足现场对门机操作的要求,达到了门机自动行走位置控制的效果,实现了门机平稳、快速地定位。本论文对门式起重机位置模糊控制方法进行了研究,设计了基于模糊控制算法的门机自动行走位置控制系统,该系统已经在丰满发电厂坝顶门机投入使用,但限于作者知识水平和工程经验的不足,论文还有很多值得改进及完善的部分:(1)本论文对门机的工作环境考虑不周,门机自身很高且在大坝上,风对其行走过程的影响不能完全忽略,在接下来的研究工作中,结合控制算法减小风力对系统的影响。在“主界面”添加调用“SetValue”函数的按钮,用于将面板当前时间传送到PLC。本章介绍了门机自动行走位置控制系统的工程实现,其中阐述了PLC的硬件组态、门机的逻辑控制过程及通讯设计;对HMI界面组态,设计了交互性较好的画面;最后实现了模糊算法的工程应用,并设计了该算法的PLC程序;最后介绍了该系统的安装及调试情况,并附上现场施工场景照片,验证了该系统能够满足工程要求。
参考文献(略)
参考文献(略)

