本文是机械工程论文,本文的目的是在不同环境下,提出一种较为科学的设计方法,文中并没有过多的分析机器人的机械结构以及野外真实环境下的运行情况等内容,望读者见谅。本文首先对野外非结构化环境进行分析,使其融合机器人系统中的不同功能。其次,对液压四足机器人腿部关节配置进行选择,并完成元件的合理装配,进一步提升机器人性能。再次,对整机机架进行设计,以最少自由度实现四足移动的仿生学原理。最后,利用功能-结构一体化软件对整个方法研究加以论证,将环境分析到机器人结构设计整个流程中的相关方法融入到软件中,利于QFD与DSM耦合的数学模型对其进行软件化表达,进一步证明该方法研究的科学有效性。
.....
第1章绪论
QFD方法可获取用户需求,但是对于分析各领域产品元素间的依赖关系,仍存在较大不足,因此将DSM方法融入其中,用于产品复杂系统的识别、分析以及管理等各个环节,对产品进行分析,更好的对产品进行设计,实现QFD与DSM间量化分析与转换,将产品设计过程与需求紧密进行可视化分析,提供更好地设计、分析和组织复杂系统的科学研究思路。本论文运用QFD与DSM耦合的方法,建立复杂产品设计流程和组织的优化模型,帮助研发人员对复杂需求结合,有利于提升市场认可度。其中QFD针对产品需求分析,通过对用户诉求的挖掘与分析,将其全面、有机地融入产品研发及设计等阶段,从根源上对产品的研究进行把控,有助于提升用户满意度。DSM将复杂产品进行多粒度划分,转化为有层级、可理解的产品,进而提升企业效率,本论文将上述方法有效结合,各取所长,对产品设计中的方法研究有着重要意义。而DSM则是以功能和结构匹配为中心,具有同步物理结构抽象功能的表示和物理元件关联横向和纵向分析、高效平衡设计思维、设计执行之间的动态变化、挖掘潜在关联关系、打破物理结构约定俗成的装配组合关系、创新方案组合层次丰富等优势,与QFD互补使用能够充分发挥二者的优势。全文从理论分析与软件验证两方面分别对该方法进行论证,综合QFD与DSM两个工具的优点,优化液压四足机器人整机性能,全文的基本框架如图1-3所示。
....
第2章非结构化环境分析与需求提取
2.1引言
在野外环境下,机器人研究最基本的问题之一是要设计一款合适的机器人结构,使其融合系统中的不同功能,实现最终的作业目的。而现有的研究中,设计者往往忽略了对野外环境的分析,从而导致机器人在作业时出现不适应环境的情况,其性能无法最佳表达。美国波士顿动力公司研发的BigDog机器人一经问世,便引起了国内外学者的巨大反响,其出色的环境适应能力更是引起了国内众多学者的关注,此后国内相继出现了多款类大狗机器人,虽然外形十分相似,但在真实环境中的表现均与BigDog机器人相距甚远,这也使国内学者纷纷从算法、建模等提高机器人性能的角度逐渐转到前期对环境的分析上,进一步说明了环境分析的重要性。本章以BigDog机器人在非结构化环境下的运行为例,将机器人需求进行聚类划分,建立模糊非解耦模型,根据置信水平值的不同,将需求按亲疏关系进行划分,确保了需求的相互独立,同时消解评价的主观性,为液压四足机器人设计的方法研究奠定基础,从基本原理来说,液压四足机器人的外形与环境配合的愈好,其机构也就愈高级。
2.2非结构化环境下的液压四足机器人需求分析
本文的研究理论主要基于设计结构矩阵与分支拓扑树结构方法,对含冲突元件的聚类矩阵进行划分,得到满足特定功能的最优产品元件配置,其主要方案可分为四个关键步骤。Step 1.对含冲突元件的设计结构矩阵进行聚类。用有向图表示元件配置关系,运用布尔代数算法将其与冲突矩阵进行累加,得到设计结构聚类矩阵,优化产品流程,迭代次数得以减少。Step 2.基于产品设计结构矩阵建立分支拓扑树结构。将设计结构聚类矩阵与典型分支拓扑树结构进行映射,转化为分支拓扑树图论的分解结构,以便对最优方案进行评价与遴选。Step 3.基于产品设计结构矩阵聚类的评价分析。在设计结构矩阵中进行模块划分,遵循高内聚低冲突的聚类原则,根据该原则对多方案进行评价与遴选,得到最优方案。Step 4.基于分支拓扑树的粒度层级分析确定最终元件组合。将最优方案进行进一步子模块划分,与多种算法结合使用,使数据简洁,冗余信息最小化以得到满足需求的最终配置元件组合。
....
第3章液压四足机器人腿部方案配置................................................................................29
3.1引言...............................................................................................................................29
3.2液压四足机器人腿部关节配置的选择.......................................................................29
3.3本章小结.......................................................................................................................33
第4章液压四足机器人机架设计........................................................................................34
4.1引言...............................................................................................................................34
4.2液压四足机器人机架结构设计...................................................................................34
4.3本章小结.......................................................................................................................51
第5章功能-结构一体化软件验证.......................................................................................52
5.1引言...............................................................................................................................52
5.2关键技术及模型...........................................................................................................52
5.3软件相关子模块...........................................................................................................53
.....
第5章功能-结构一体化软件验证
5.1引言
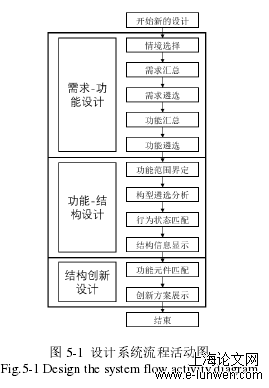
为进一步验证QFD与DSM耦合方法对液压四足机器人研究的科学性,本章采用功能-结构一体化软件这一重要工具,将环境分析到机器人结构设计整个流程中的相关方法融入到软件中,利用有关数学模型加以论证,对其进行软件化表达。软件主体设计系统依托“情境-需求-功能-结构-创新方案”这条设计思路,通过选取情景分析中的人、机、务、环,逐步得到对应的需求,通过质量屋遴选出重要的功能,进行机器人腿式构型的遴选分析,最后通过功能-元件矩阵匹配元件连接顺序,生成几种不同的结构创新方案,通过结构合理化筛选出最优的设计方案,为论文的研究提供帮助,设计整体流程如图5-1所示。
5.2关键技术及模型
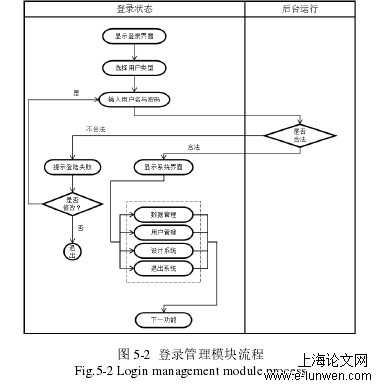
本软件从需求分析到功能结构模块化的聚类分析,根据需求条件,通过结构化整理,按照需求类别和等级进行排序,其中等级高的需求优先满足,借助QFD由需求结构分析,整理得出液压四足机器人的功能体系,并综合应用智能化处理算法中,对功能进行有效归并和整理,全面完成功能的列举,降低功能数量过多导致的物理复杂性。实际上液压四足机器人零部件数量众多,以功能流为基础使用DSM,对这些零部件建立标准化的聚类可以使机器人结构更为紧凑,便于管理。通过QFD和DSM集成技术完成功能的聚类分析,在此基础上借鉴现有的QFD和DSM方法模型,二者进行集成形成统一的聚类分析工具。登录子模块是负责软件用户端的登录,包括所有软件的使用者的登录管理,用户和管理员要登录到软件系统中必须经过登录界面,选择使用者类型并输入自己的用户名和密码,不同的使用者具有不同的权限,系统通过判断用户的权限信息情况,以提供不同系统服务,当使用者登录失败时,提示修改用户名或密码。系统登录管理模块流程如图5-3所示。起始端为登录界面,进入选择用户类型界面和输入用户名和密码界面,系统后台检查登录合法性,如果不合法则提示修改或退出系统,如果合法则显示系统界面。系统界面共显示四种选项,分别为:数据管理、用户管理、设计系统和退出系统,当用户选择某一个选项后则结束。软件登录界面如图5-3所示。
.....
结论
本文仍存在如下几个问题需做进一步研究。(1)在非结构化环境分析章节中,着重以美国波士顿动力公司的BigDog机器人为研究对象,只选取了十余种典型环境,而欠缺对相关环境参数的进一步研究。此外,在机器人需求与工程特性相关重要度的矩阵打分中,每位专家打分相对客观,但未能充分考虑到真实野外环境下对机器人的制约情况。(2)在非结构化环境分析与需求提取章节中,通过QFD方法构建质量屋,将需求对功能的关联关系进行打分,并计算该工程特性在整个液压四足机器人设计体系中的比重,结果相对客观,需着重考虑。(3)在功能-结构一体化软件验证章节中,对液压四足机器人结构进行了遴选,应基于相关数学模型进行进一步仿真分析,根据仿真结果对其优化,可使得液压四足机器人最终结构更具说服性。
参考文献(略)
参考文献(略)

