本文是机械工程论文,对基于双目视觉的目标药盒识别定位与抓取系统进行分析设计,包括机器人运动学、手眼标定、双目标定、三维重建。①建立4自由度取药机器人的运动学模型,对其进行正逆运动学分析,求解末端位姿与各关节变量之间的关系。②对Eye-in-Hand型机器人视觉系统进行手眼标定研究,完成手眼关系矩阵的推导。③利用张正友标定法设计双目系统标定程序,完成单目标定和双目标定。④建立汇聚式双目系统测量模型,利用此模型推导空间中任意一点的三维坐标,完成三维重建。搭建双目视觉测量系统实验装置,并进行了双目测量系统标定实验和目标药盒三维重建实验,验证了所设计的标定方法和药盒识别定位方法切实可行,为取药机器人系统的产品化开发奠定了基础。
.....
第一章绪论
本文研究内容是与企业合作开发项目的部分内容,旨在设计一款药房自动取药机器人,实现药品的高效管理和自动发放,降低医药人员的劳动强度、提高药品的发放效率、减少差错率,让药剂师发药和患者用药的过程变得更加规范化、科学化,为药房自动化的实现提供一种解决方案。主要研究内容如下:(1)绪论介绍本课题的研究背景与意义,查阅文献资料,对国内外药房自动化系统的研究现状和典型的自动化药房产品及其技术特点进行综述分析;确定适用于国内医药行业的自动化药房系统;对目前工业机器人和双目立体视觉系统结合进行目标识别与定位抓取的研究现状进行分析。(2)取药机器人总体方案设计根据取药工作特点,确定机器人的设计要求和相关技术参数。综合考虑药房空间、药架结构和药盒形状及尺寸等因素,制定自动化药房的总体方案;在此基础上,确定取药机器人的原理方案,并对取药机器人的传动系统、支撑系统、双目视觉系统进行方案设计与论证分析。(3)机械结构设计对取药机器人本体结构中的水平移动组件、竖直升降组件、回转运动组件、前后伸缩组件和末端执行器结构中的夹持机构和落药机构进行设计,完成取药机器人系统从动力部分、传动部分、支撑部分到执行部分的设计与计算校核;对关键零部件和伺服电机进行
选型设计与计算。
....
第二章自动化药房系统总体方案设计
2.1自动化药房系统设计方案与要求
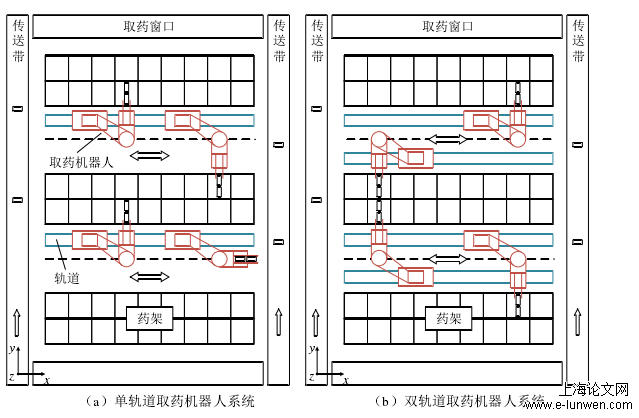
图2.1(a)所示为水平移动结构采用单轨道的取药机器人系统,轨道安装在靠近其中一侧的药架旁,回转结构的回转中心与两药架之间的过道中心重合,并且通过一块连接板与水平移动和竖直升降结构连接固定,该连接板与水平方向夹角为45°,图示为取药机器人分别在两侧药架上进行取药的结构示意图,当取药机器人在左侧药架上进行取药时,连接板与末端机构呈45°夹角;当在右侧药架上进行取药时,连接板与末端机构呈135°夹角;当取完药后,末端机构与水平方向重合,将药品送至传动带上,经传送带送到取药窗口给药剂师。图2.1(b)所示水平移动结构采用双轨道的取药机器人系统,两条轨道分别靠近两侧药架,并且关于过道中心线对称,每条轨道上组装有一台取药机器人,而每台取药机器人可以取任意一侧药架上的药品,两台取药机器人共同协作,进行药品的发放工作,进一步提高了系统的工作效率,减少了发药时间。依据取药机器人的结构和安装方式可知,两台机器人同时进行工作或相遇时,相互之间不会产生干涉。在基于机械手式的自动化药房系统的组成中,取药机器人是最核心的部分,因此,本文主要对取药机器人及其视觉系统的设计进行深入分析与研究。
2.2取药机器人原理方案的确定
对于自动取药机器人系统来说,当药品被存放到药架之上时,该药品在药架之上的位置信息就被唯一确定,药品自身及药盒的尺寸信息等均被记录在计算机系统中。当有病人来取药时,药剂师将所取药品的信息输入到计算机系统中,计算机系统向机器人发送取药指令并告知机器人目标药品在药架上的具体位置,此时,机器人将锁定与自己当前位置最近的目标药盒的位置,并控制其机械系统运动完成取药动作。取完药后,药品落入机器人末端的落药机构上,并通过落药机构转移到传送带上,最终通过传送带将药品传送到药剂师手中。取药机器人由当前位置运动到目标药品的位置需通过其机械结构的运动来完成,一般流程为:先沿两药架之间的通道水平移动,并沿竖直方向运动到目标药盒的指定高度,接着通过回转机构使取药机器人末端机构正对药架,此时伸缩机构带动夹指向前移动夹取药盒,两夹指之间的距离略大于目标药盒的宽度。
.....
第三章取药机器人机械结构设计.................................................................................21
3.1移动自由度的设计............................................................................................21
3.2转动自由度的设计............................................................................................28
3.3末端执行器的设计............................................................................................31
第四章关键零部件理论受载分析与有限元仿真.........................................................45
4.1承载滑座系统的理论受载分析........................................................................45
4.2圆弧导轨的理论受载分析................................................................................49
4.3关键零部件的有限元分析................................................................................52
第五章基于双目视觉的药盒定位系统设计与实验研究.............................................59
5.1药盒识别与定位系统总体设计........................................................................59
5.2双目立体视觉系统标定....................................................................................60
.....
第五章基于双目视觉的药盒定位系统设计与实验研究
5.1药盒识别与定位系统总体设计
为实现取药机器人对目标药盒的准确抓取,首先利用双目视觉系统对目标药盒进行识别与定位,获取目标药盒在相机坐标系下的位置信息,然后通过机器人手眼标定和机器人运动学将该目标药盒的位置信息转换到取药机器人基坐标系下,此时机器人控制系统根据得到的位置信息控制末端执行器执行抓取动作。如图5.1为目标药盒的识别与定位系统技术路线图。
5.2双目立体视觉系统标定
在取药机器人的整体结构方案中,竖直升降系统与末端伸缩、夹持及落药系统之间通过弧形承载板进行连接,且弧形承载板为悬臂结构,是取药机器人机械结构中的关键连接和承载零件,其强度和刚度对机器人能否稳定运行影响较大,因此,需要对其进行静力学分析。弧形承载板的材料可选用铝合金或钢材,铝合金质量较轻,有利于取药机器人实现更轻便快捷的运动;而钢材的刚度比铝合金更好,但是过高的重量可能会对悬臂结构产生威胁,需通过有限元静力学分析结果进行比较。首先,对模型赋予铝合金材料,对弧形承载板与两个连接件整体进行自动网格划分,并对弧形承载板上回转电机的4个安装孔和型滚轮的5个安装孔处进行细化处理,划分完成后得到78899个节点和46253个单元。
.....
第六章总结与展望
本文设计了一款基于双目视觉的自动取药机器人,利用视觉系统完成对目标药盒的自动识别与定位,然后实现机器人自动抓取药盒。该系统为药房自动化提供了一种解决方案。主要研究内容与成果如下:(1)针对取药机器人大跨度(沿药架高度方向,定义为z轴,约3000mm)、长距离(沿药架长度方向,定义为x轴,约4000mm)的工作特点和快速、准确抓取药盒的设计要求,采用3移动(x/y/z轴)、1转动(R轴)的直角坐标机器人作为本体结构设计方案。其技术特点:①沿x轴和z轴的移动均采用带齿条的V型滚轮直线导轨,这种直线运动系统能同时实现传动、支撑与导向的功能,结构十分紧凑,运动速度可达10m/s。②绕R轴的转动采用同步带驱动带齿的圆弧导轨,将传动部件和承载部件集成到一起,结构简单、安装方便、质量较轻、运动平稳。机器人视觉系统采用“眼在手上”(Eye-in-Hand)的双目视觉方式。(2)取药机器人机械结构设计与驱动电机选型。取药机器人机械结构由水平移动机构、竖直升降机构、回转机构和末端执行器(包括前后伸缩机构、药盒夹持机构和自动落药机构)组成,对各部分的结构形式、动力部件、传动部件、支撑部件与执行部件进行设计、选型与计算校核,并完成了各个运动机构驱动电机的选型设计与计算。最后,利用Solidworks完成取药机器人整体机械结构的三维设计
参考文献(略)
参考文献(略)

