本文是一篇工程硕士论文,工程硕士论文是指工程师硕士论文,工程管理硕士论文与工程硕士论文发表的工程论文。工程硕士论文涵盖集建筑、结构、电气、暖通空调、水利、园林、市政、路桥、给排水、装修、施工、造价、节能、监理、房地产、环保、规划、岩土、林业,工程师,软件工程,工程硕士,林业工程师,电力工程, 化工工程, 控制工程,工业工程, 系统工程, 电气工程, 水利工程,工程师职称,公路工程,软件工程, 建筑工程,土木工程,工程类杂志 咨询、考试、其他等共42个类别的专业。(以上内容来自百度百科)今天为大家推荐一篇工程硕士论文,供大家参考。
第 1 章 绪论
1.1 课题背景及意义
脊柱外科一直以来被认为是高风险的手术之一,尤其最近几年,我国乃至世界脊柱疾病的发生率在逐年升高,而传统的脊柱外科手术都是有医生手动操作来完成的,医生必须要有有较好的心理素质,而且需要有丰富的手术经验,医生在手术中稍微不加注意就会出现错误的操作造成无法挽回的后果。随着我国治疗水平的提高,现代外科手术的成功与否已不再完全依靠医生的经验来决定了,而是通过先进的手术器械和智能化的设备作为手术成功的保障,脊柱外科手术机器人作为一种智能化的设备,相比传统医生而言,可以改善手术过程中由于医生导致出现的一些误操作,在手术过程中有更高的精准性和稳定性,可以降低手术风险和术后并发症,可以减少医生在手术过程中的放射损害。对于手术中辅助医生完成脊柱手术有着重大的现实意义。椎板减压术是脊柱手术中非常重要的一种术式之一,传统医生需要手持骨转进行磨削,在保证安全的情况下,需要大的创口来扩大术野。随着微创技术的发展,小切口开窗术越来越受到欢迎,在保证手术稳定性的前提下使得手术创伤更加小,术后并发症更加少。本文以椎板减压术为背景,以微创的观念,研发一种适合于椎板减压术的椎板磨削机器人。
..........
1.2 国内外研究现状
外科手术机器人在近几年的到了快速的发展,以达芬奇手术机器人系统为代表在实际临床中得到了较好的效果,机器人以其高稳定性和准确性得到广泛的亲睐,下面介绍一下国内外手术机器人研究状况。ROBODOC 机器人系统 1992 年美国 Intergrated Surgical Systems 公司正式研究出了商品化产品 ROBODOC,ROBODOC 机器人系统主要应用在全髋关节置换术[1]。医生利用 ROBODOC 做了第一例全髋关节置换手术。这使机器人辅助手术的发展达到了一个新的阶段。ROBODOC 的样机本体是一个四自由度的直角坐标工业机器人,在末端增加一个关节,用来调节机器人的姿态,当机器人辅助医生开始手术时,首先一个钛金属的定位针插入病人大腿骨上进行定位。在手术中,机器人的基座要通过固定装置与病人的腿骨固定在一块,为了使手术中病人与机器人基座的相对位置不变[2]。机器人利用末端安装的切削钻头,从而对病人的骨组织进行磨削。有研究表明由 ROBODOC 辅助完成的手术效果相比较传统手术较好,而且操作比较简单,医生容易上手。但是由于机器人系统还存在比较多的缺点,所以并没有很好的推广出去。ZEUS(宙斯)机器人系统 2000 年初,美国 Computer Motion 公司研制了―ZEUS机器人外科手术系统[3-6]。ZEUS机器人系统将微创手术带入了一个新的阶段,手术的精度大大的增加了。而且创伤小,减少了患者的痛苦, 能够很好的辅助医生更快的完成手术。“ZEUS”系统主要包括一对主手、显视器、控制平台和从手。它的从手是一个三臂机器人,“ZEUS”系统通过主从遥操作技术,可以让医生轻松的操纵主操作手,通过显视器来控制从操作手实施手术。从手一共有三个机械手,一个用来把持腔镜,其它两个用来完成手术操作。“ZEUS”系统作为第一代真正意义上的主从遥操作外科机器人系统,在 2001 年,“ZEUS”系统做了真正的远程操作手术,是在法国斯特拉斯堡与美国纽约之间实现,整个手术过程采用 ATM 专线通信,主从操作时延为 155ms[7-8]。
.........
第 2 章 椎板磨削机器人结构设计
2.1 引言
本章主要针对椎板减压术设计的一种椎板磨削手术机器人,介绍了椎板磨削的手术背景,其次介绍整个系统总体设计以及手术机器人结构设计,并对几个关键部件进行了有限元的校核。
........
2.2 手术背景
椎板减压手术是脊柱手术中非常重要的术式之一。主要用于腰锥管狭窄症,最常见的是腰锥管开窗术,它是通过扩大椎管的空间来释放压迫的神经和血管,使其恢复正常的功能,从而达到解压的效果。其中最主要的操作方式为椎板磨削,根据病灶通过骨转磨削一侧或两侧椎板,从而释放压迫神经,如图 2-1 所示为椎板减压示意图。腰椎管狭小症(lumbar spinal stenosis,LSS)是指由于腰锥中央椎管、侧隐窝以及椎间孔的直径减小而导致的一类疾病。如图 2-2 所示,目前临床上根据腰椎管狭窄症的发病原因,可以分为先天性、发育性椎管狭窄以及继发性椎管狭窄。继发性椎板狭窄分为退行性、创伤性、医源性以及其他椎弓峡部裂滑脱所致的腰锥管狭窄,临床上以退行性腰锥管狭窄最为常见。整个手术机器人系统由机器人控制系统和图像导航系统组成,机器人控制系统接收来自图像导航系统的导航信息,从而给机器人发送指令使得机器人按照规划好的路径进行磨削。机器人控制系统包括椎板磨削机器人和机器人控制软件;图像导航系统包括图像导航软件和红外光学定位装置。在患者和机器人末端上装有靶点,红外光学定位装置可以跟踪患者和机器人末端的靶点,从而得到它们位置信息;将病人术中的 CT 图像在导航软件中进行三维重建,并在重建的三维图像上进行手术规划,在术中通过注册让患者的实际体位与三维图像匹配起来。椎板磨削机器人是整个系统的执行机构,末端装有力传感器,通过实时采集磨削过程中的力信号,进行状态感知,保证磨削过程中的安全。
........
第 3 章 手术磨削机器人运动学分析......23
3.1 引言.............23
3.2 坐标系建立...........23
3.2.1 确定各连杆 D-H 参数和关节变量........24
3.3 运动学正解............25
3.4 手术磨削机器人的逆运动学......26
3.5 机器人的雅克比矩阵.......29
3.6 工作空间分析.......32
3.7 小结.............33
第 4 章 控制平台搭建........35
4.1 引言............35
4.2 机器人控制系统硬件结构..........35
4.3 控制软件界面........39
4.4 小结............41
第 5 章 轨迹规划.....43
5.1 引言............43
5.2 关节空间轨迹规划..........43
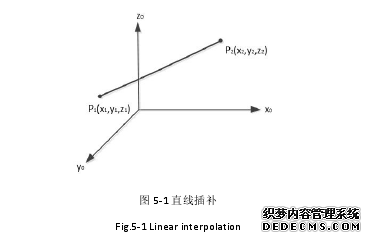
5.3 笛卡尔空间轨迹规划......47
5.4 三次样条函数插值仿真.............55
4.5 小结............59
第 5 章 轨迹规划
5.1 引言
机器人在执行任务需要给定一条路径,机器人轨迹规划就是要确定机器人要经过的路径并在运动中得到机械臂的末端或者各个关节在路径点的位移,速度以及加速度。机器人在执行任务的时候,我们需要规定所要执行任务的路径,也就是机器人的运动路径以及路径点的速度及加速度,下面分别介绍了在关节空间中进行轨迹规划和在笛卡尔坐标空间进行轨迹规划两种轨迹规划的方法。在关节空间进行轨迹规划首先要通过逆运动学算出各关节角,然后对各关节的运动进行规划,就是将关节变量表示成时间的函数;在直角坐标空间轨迹规划是通过末端的信息得到关节的位移,速度以及加速度对末端的位姿轨迹进行规划,然后再进行逆运动学的计算。
..........
结论
本文以椎板减压手术为医学背景,结合医生临床手术的宝贵经验,设计出了椎板磨削手术机器人,针对椎板磨削机器人主要研究了一下几个方面:
(1)对椎板磨削手术机器人进行了结构设计,其主要包括一个五自由度的小型机械臂和一个进给装置,通过 solidworks 完成了磨削装置的三维建模、工程绘图及样机加工并搭建起了运动控制平台。
(2)对所设计机器人进行运动学分析,采用 D-H 法进行了正运动学的求解,采用逆推法进行了逆运动学的求解,通过微分变换法求得了机器人的雅可比矩阵,并通过迭代法分析了机器人的工作空间。
(3)主要介绍控制平台的搭建,首先介绍了控制系统的硬件结构,并分别介绍了控制系统各组成原件,然后对伺服电机及减速器的选型进行了详细的介绍。最后介绍了控制软件的功能。#p#分页标题#e#
(4)为了满足磨削的稳定性,对磨削路径进行了轨迹规划,介绍了关节空间轨迹规划法及笛卡尔空间轨迹轨迹规划法,最后采用笛卡尔空间轨迹规划法中的三次样条插值对其磨削路径进行轨迹规划,并进行了三次样条曲线仿真验证。
..........
参考文献(略)

