车辆工程论文哪里有?本文面向具有主动制动功能的汽车,围绕制动工况下汽车线控制动与半主动悬架联合控制问题展开研究。考虑不同制动工况下对于舒适性与安全性的需求不同,通过线控制动与半主动悬架联合控制,实现汽车行驶过程中综合性能的改善。
第 1 章 绪论
1.2 国内外研究现状
1.2.1 半主动悬架系统国内外研究现状
1.2.1.1 半主动悬架减振器研究现
随着汽车电控技术和其他交叉学科的发展,主动悬架及半主动悬架的实现和应用逐渐成为了可能。主动悬架的概念[2]在 1954 年由 Federspiel Labross 首次提出,随后Thompson 在 20 世纪六十年代对主动悬架的概念及相关领域进行了全面的总结归纳,为后续的研究奠定了理论基础。通过近三十年的理论研究,上世纪八十年英国莲花公司设计制造第一辆搭载主动悬架的试验车[3],随后奔驰、雪铁龙、奥迪等企业先后开展了一系列主动悬架的实车应用。随着众多学者与企业对主动悬架研究逐步加深,发现尽管主动悬架实现了汽车平顺性与操纵性的提高,但仍存在许多问题,比如结构复杂、耗能大、质量与体积大,因此目前主动悬架应用仍不普及,仅多装备于高端汽车。
半主动悬架的概念最早由美国加州大学戴维斯分校的学者 Karnopp 于 1973 年提出,并于上世纪八十年开始样品的试制研究[4]。尽管半主动悬架的概念提出的较晚,但是以其耗能小、结构原理简单、成本低等优点在近年来得到了迅速地发展。半主动悬架通常可分为刚度可调和阻尼可调两种,但是由于刚度可调的半主动悬架的成本相对较高,因此阻尼可调的半主动悬架一直以来是众多学者和企业关注的对象。
作为阻尼可调半主动悬架的核心零部件之一,阻尼可调减振器的发展推动着半主动悬架系统发展。目前阻尼可调减振器的从结构原理上可以划分为两类:一类是依靠电控阀调整节流孔面积的阀式阻尼可调减振器,另一种是基于智能材料阻尼特性可变的阻尼可调减振器。
车辆工程论文
...............................
第 3 章 车辆动力学模型与半主动悬架控制器设计
3.1 面向半主动悬架控制的车辆动力学模型
3.1.1 二分之一车辆动力学模型
对于线控制动与半主动悬架联合控制,从悬架角度,我们需要关注的是车辆由于路面不平度引起的簧载质量垂向振动以及簧下质量跳动。除此之外,由制动引起的车身俯仰运动也是联合控制中需要特别关注的平顺性指标。从制动角度,由于只研究直线制动工况,所以我们需要着重关注的是车辆纵向动力学特性。因此,本文选择五自由度单轨半车模型(后续文中均以半车模型代指二分之一车辆动力学模型)作为后续研究的基础。关于车辆模型,做出以下假设:假设车辆左右完全对称;忽略车身侧倾以及侧向力影响,仅考虑车辆在带有随机地面不平度激励的水平路面上直线制动;忽略风阻、轮胎半径变化等差异;忽略轮胎阻尼作用,只考虑轮胎刚度,将轮胎等效成线性弹簧。
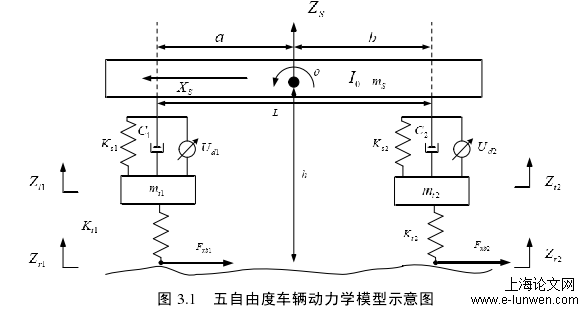
图 3.1 五自由度车辆动力学模型示意图
................................
第 5 章 线控制动与半主动悬架联合控制仿真分析
5.1 线控制动与半主动悬架联合控制仿真平台
线控制动与半主动悬架联合控制仿真平台框架如图 5.1 所示,所有模型与控制器模块均基于 MATLAB/Simulink 软件展开。
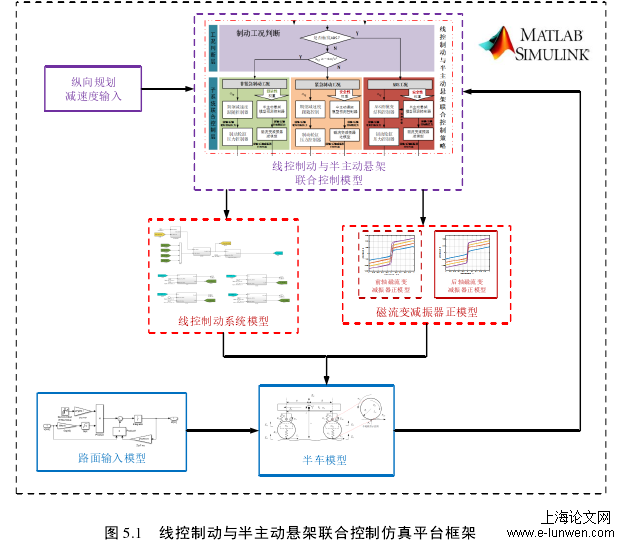
图 5.1 线控制动与半主动悬架联合控制仿真平台框架
线控制动与半主动悬架联合控制仿真平台包括纵向规划减速度输入模块、线控制动与半主动悬架联合控制模型、线控制动系统模型、磁流变减振器正向模型、路面模型以及半车模型(包含轮胎模型)。其中线控制动与半主动悬架联合控制模型中抗积分饱和 PID 控制器、线控制动期望减速度控制器、线控制动 ABS 滑模变结构控制器以及半主动悬架模型预测控制器均采用 Simulink 中 MATLAB Function 功能实现。
.............................
5.2 联合控制策略典型制动工况仿真分析
选择四种典型纵向制动工况用于仿真验证。分别为:
(1)非紧急制动工况; (2)紧急制动工况; (3)自适应巡航跟车制动工况; (4)ABS 工况。
其中,工况(1)、工况(2)分别以单一期望减速度以阶跃形式体现,常出现于 AEB 分级控制中。工况(3)则用于验证半主动悬架控制对于纵向速度规划的影响以及不同制动工况下悬架功能分配策略的有效性。工况(4)用于验证线控制动 ABS 与半主动悬架联合控制的有效性。制动过程中由于轴荷转移的存在,前后轴车轮动载荷会相对静态位置存在偏移,因此不能单纯的以车轮动载荷来衡量制动工况中的轮胎附着情况,即评价安全性。但是对于工况(1)、工况(2)、工况(4)而言,制动过程中,制动强度以及纵向减速度均在定值波动,对于整个过程而已轴荷转移量因此也在某定值上下波动,因此选择制动过程中轮胎动变形的标准差来描述轮胎的跳动情况,即轮胎动变形的标准差越大,制动过程中轮胎变形量偏离轴荷转移后变形定值的程度越高,车轮动载荷波动越剧烈,反则车轮动载荷波动越小。
综上,选择垂向加速度加权加速度均方根、俯仰角加速度加权加速度均方根值以及总加权加速度均方根值来描述平顺性,即车辆行驶的舒适性。选择前、后轴轮胎动变形的标准差来描述轮胎附着情况,即车辆行驶的安全性。
............................
第 6 章 全文总结及研究展望
6.1 全文总结
本文面向具有主动制动功能的汽车,围绕研究制动工况下汽车线控制动与半主动悬架联合控制的问题展开研究。将纵向规划减速度引入制动工况判断,根据不同制动工况下对于悬架的功能需求,合理调整半主动悬架控制器多目标控制权重,通过线控制动与半主动悬架联合控制实现汽车行驶过程中综合性能的提升。本文建立了线控制动与半主动悬架子系统模型,并设计子系统控制器以及线控制动与半主动悬架联合控制策略,通过搭建仿真平台验证了子系统控制器以及其联合控制策略的有效性。具体工作内容如下:
(1)本文阐述了线控制动系统工作原理,并建立了包括高压蓄能器模型、电机泵模型、电磁阀模型以及制动轮缸模型在内的线控制动系统数学模型。在此基础上将增、减压阀与制动轮缸放在整个系统回路考虑,根据线控制动系统硬件在环试验台得到的轮缸压力响应特性,对线控制动系统轮缸增、减压过程进行参数辨识,以完善仿真模型。此外,本文针对线控制动系统执行机构的特点,设计了轮缸压力抗积分饱和 PID 控制器,并通过快速控制原型对控制器的有效性进行了验证。结果表明,本文所设计抗积分饱和 PID 控制算法能够有效的满足线控制动系统”快速建压“与”精准控压“的轮缸压力控制要求。
(2)本文面向半主动悬架控制,建立了包含垂向纵向耦合关系的五自由度半车模型用于控制器所需的参考模型,此外还建立了包含车轮滚动模型的七自由度半车模型、轮胎模型、路面输入模型以及磁流变减振器力学模型用于后续仿真平台的建立。其中,磁流变减振器力学模型基于双曲正切模型,利用减振器特性试验数据采用遗传算法通过参数辨识获得。并根据所辨识的磁流变减振器正向模型推导了逆向模型,用于后续半主动悬架控制。此外,本文还设计了半主动悬架模型预测控制器,包括用于控制器所需的车辆状态观测与地面输入估计的状态观测器设计,用于后续线控制动与半主动悬架联合控制仿真验证。
参考文献(略)

