本文是一篇工程论文,在现代社会中,“工程”一词有广义和狭义之分。就狭义而言,工程定义为“以某组设想的目标为依据,应用有关的科学知识和技术手段,通过有组织的一群人将某个(或某些)现有实体(自然的或人造的)转化为具有预期使用价值的人造产品过程”。(以上内容来自百度百科)今天为大家推荐一篇工程论文,供大家参考。
第 1 章 绪论
1.1 课题研究背景及意义
近几年,我国的经济得到了快速的发展,我国也逐渐提高了对于自然保护、维护生物多样性的重视,加大了生态保护的力度。保护鸟类多样性对提高生物多样性和维持生态平衡有重要意义,增强对于鸟类的保护工作,可以改善自然条件,进而提高人类的生活水平。我国地大物博,有一千多种鸟类,其中有不少是珍稀鸟类、益农鸟类,但是由于环境恶化,人为干预等问题使鸟类生存状况日益恶化,甚至面临着灭绝危机。水污染和有毒有害物质的大量排放在很大程度上破坏了鸟类的栖息地,对于一些分布狭小的鸟类来说,栖息地的丧失对于他们是致命的,例如陕西黄河湿地开发导致自然保护区天然湿地大面积消失,截至 2010 年,鸟类栖息地的面积减少了 20000 公顷,导致区内越冬的水禽灰鹤、大鸨和黑鹳等的数量急剧减少。同时,人为因素也严重影响着鸟类生存,例 2017 年 10 月 17 日,四川省资阳市公安局破获了一起利用录音机播放鸟类声音,吸引鸟类加以捕捉的案件。该犯罪团伙共捕猎鸟 5000 余只,查获3000 余只,其中有北红尾鸲 2 只,小鹀 3067 只,普通翠鸟 1 只,灰头鹀 1 只,均属于国家保护野生动物。通过视频监控[1]的方式及时发现鸟类,可以对鸟类进行有效的保护。另外,在某些特定场合,鸟类也会给人类生活带来不小的危害,比如水果,蔬菜等农作物很容易受到鸟类的啄食,导致农作物很容易被其他害虫寄生,从而失去经济价值,这对我国农牧业造成了严重危害,给农业生产带来了很大的影响。鸟类与人类飞行器发生碰撞,简称鸟击,是鸟类对人类生活造成损失的另一方面,由于飞机飞行速度快,在空中与鸟类碰撞后,对飞机造成的破坏是极其严重的,目前,航空事故中有很大一部分是由于鸟击造成的。在我国由于鸟击导致的航空事故也已占所有航空事故的 1/3,在美国,每年鸟击直接带来的损失已经超过了六亿美元。在农地,机场等场合,使用驱鸟系统[2]对鸟类进行有效的驱赶可以极大地降低对人类生活带来的危害。
..........
1.2 国内外研究发展现状
随着机器学习,模式识别,数字图像处理等学科的不断发展与进步,以及计算机性能的大幅提升,目标检测成为了最热门的研究课题之一。鸟类检测作为目标检测中的一个重要方面,其主要任务是从图像中寻找包含鸟类目标的区域。本节主要阐述鸟类检测的研究难点和鸟类检测国内外研究现状。目标检测中较热门的领域,比如行人检测、车辆检测等,经过多年的研究与发展,在检测精度、检测速度、稳定性等指标上都得到了很大的进步,但鸟类检测相对于其他目标的检测具有更大的挑战性,其主要难点集中体现为以下几个方面:(1)鸟类的多样性。区别于车辆,水杯等刚性目标,鸟类属于非刚性目标,包括若干个会产生形变的部位,如头部、翅膀、足部、躯干等,且不同于行人,猫狗等非刚性目标,鸟类目标的部件变形幅度更大,造成鸟类姿态千变万化。此外,鸟类目标种类繁多,全世界已发现鸟类 9021 种,不同种类的鸟类各个部位差异明显。鸟类的这些特点给检测带来了较大的困难。(2)鸟类的尺度变化。不同种类的鸟类本身大小相差较大,同时,在拍摄图像时,鸟类与摄像头的距离不一样增大了鸟类在图像中尺度的差异性。在鸟类检测的过程中,需要对图像中的区域进行检索,而鸟类尺度的差异性增加了检索的范围,进而增加了计算量,影响了检测的实时性。另外,较小尺度鸟类也增加了检测难度,易出现漏检的情况。
........
第 2 章 基本理论
本章以鸟类检测相关基础知识为切入点,首先介绍了图像中涉及特征提取技术的一些经典特征描述子,之后详细讲解了可形变部件模型(DPM),包括DPM 的模型结构、模型训练、训练流程、后处理及相关数据集,最后对 DPM存在的问题进行了分析论述,为后续章节提供理论基础和铺垫。
2.1 图像特征提取
在一幅图像中,我们一般通过目标的特征描述子来区分目标区域与其他区域,在计算机视觉领域,图像的特征提取是整个领域的基础工作,也是目标检测中的关键一环,它的主要作用是从图像的目标像素点中获取最能表达该目标的信息,并输入到分类器中进行判断,而特征的好坏对分类器的训练及后续的检测效果至关重要,接下来详细介绍几种流行的图像特征。1998 年,Papageorgiou[45][46]首次提出人脸检测中应用 Harr 小波函数,但是该方法在使用过程中没有达到理想的效果,针对其中存在的缺陷,Papageorgiou将其改进为三种不同类型的特征,并将其组合成特征模板。2005 年,Viola 和Jones[47]将其扩展成三种类型四种形式的特征模板,如图 2-1 所示。通过黑色和白色两种矩形框组成特征模板,计算白色矩阵像素和黑色矩阵像素的差值和得到该模板的特征值,该值显示了图像的灰度变化情况,例如:人脸的一些特征可以通过矩形特征进行简单表示,如图 2-1 右图所示,鼻梁两侧的颜色比鼻梁颜色更深一些,嘴巴的颜色比邻域颜色更深一些等。
........
2.2 可形变部件模型
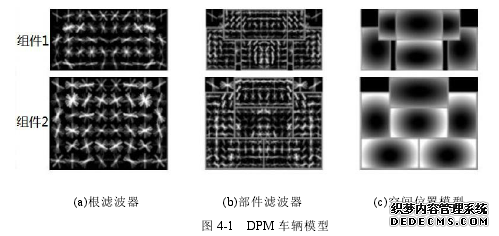
可形变部件模型(DPM,Deformable part model)是由 Felzenszwalb 教授等人提出的目标检测框架,DPM 采用 HOG 特征、SVM 分类器和滑动窗口(sidingwindow)的检测思想,包括一个分辨率较低的根滤波器来覆盖滑动窗口中的整个目标,还包括若干个分辨率较高的部件滤波器通过进一步的细节特征来判断目标各组成部分的存在,以及每个部件相对于根的空间位置模型来对部件形变进行损耗的判断,这种先对目标大致定位,再进一步判断的检测方式具有较好的检测效果。可形变模型使用多尺度的 HOG 特征金字塔[51]来描述目标的特征,在各组金字塔的每一层中提取 HOG 特征,对目标的尺度变化有较好的鲁棒性。可形变部件模型包括一个分辨率较低的根滤波器、若干个分辨率较高的部件滤波器和所有部件滤波器相对于根滤波器的空间位置模型。根滤波器的作用是获取目标的大致轮廓信息,根滤波器的分辨率一般设置为部件滤波器的 1/2,用于描述目标各个部位的细节,空间位置模型用于评价各个部件相对于整个目标的位置关系,以及部件发生变形后的惩罚策略。鸟类是非刚性目标,检测时易受视角变化、遮挡、光照、姿态变化等影响,其中姿态变化是主要因素,鸟类姿态大致分为站立,飞翔,游三种,其中每种姿态又包含正面、侧面等,多变的外观给检测带来了很大影响。针对此类问题,本文在模型训练时,将数据集中的样本按长宽比分为若干子集,针对不同子集单独训练得到组件模型,最后组合各组件得到鸟类混合模型,通过这种方式可以较好地应对鸟类姿态变化。如图 2-7 显示了 DPM 算法训练得到的一个两组件的鸟类模型,第一行到第二行展示了两个不同姿态的鸟类组件,第一列为根滤波器,第二列为部件滤波器,第三列为空间位置模型。
........
第 3 章 结合 ACF 特征和 DPM 模型的鸟类检测算法研究.....23
3.1 引言..........23
3.2 实验数据集.....23
3.3 ACF-DPM 模型.......27
3.4 实验及结果分析.....30
3.5 本章小结.........34
第 4 章 改进的 ACF-DPM 鸟类模型..........35
4.1 引言..........35
4.2 ACF-DPM 模型优化.......36
4.2.1 组件及部件优化分析......... 36
4.2.2 滤波器尺寸优化分析......... 38
4.3 加权的鸟类 ACF-DPM 模型.........39
4.4 实验结果及分析.....41
4.5 本章小结.........46
第 5 章 总结与展望......47
5.1 本文工作总结和创新点........ 47
5.2 未来工作展望.........48
第 4 章 改进的 ACF-DPM 鸟类模型
4.1 引言
组件和部件数作为鸟类模型训练中最重要的两个参数,对模型最后的检测效果十分重要。传统 DPM 算法对不同种类的目标均采用 2 组件 6 部件训练模型,对于行人、车辆等外观变化较少、形变较小的目标,能达到较好的效果,但是鸟类目标具有更多的种类和更加多变的姿态,因此如何选择合适的组件和部件个数,以提高检测精度是 ACF-DPM 算法中的一个需要研究的问题。另外,传统 DPM 算法在训练中设置根滤波器尺寸时,均选择该组样本按长宽比排序后 20%处的面积,且在初始化部件滤波器时,选择覆盖根滤波器的 80%,这样的设置对行人、车辆等能基本占据候选框的目标,效果比较理想,ACF-DPM算法也采用了这样的设置方式,但是,通过实验发现,鸟类目标往往只能占据候选框一半左右的面积,这导致在训练中,出现将背景当做鸟类部位的情况,而在检测时,也容易将背景区域作为鸟类部位与对应的滤波器进行卷积,最终造成误检和漏检。同时,在自然场景中,鸟类由于自身姿态的多样性及环境的复杂性,在实际图像中经常出现鸟类互相遮挡或者被其他物体遮挡的情况,这导致鸟类信息被隐藏。在 ACF-DPM 鸟类模型的训练过程中,被遮挡的特征被当做鸟类的特征,这将降低模型的有效性;在检测过程中,图像中鸟类被遮挡部分与部件滤波器卷积时会导致该部件滤波器得分降低,而没有被遮挡的部分的得分没有变化,最终将影响鸟类目标的得分,造成鸟类目标的误判,导致检测率下降。在 ACF-DPM 模型中,根滤波器获取鸟类的整体信息,部件滤波器获取鸟类的各部位信息。由于鸟类不同部位的信息有不同的重要性,导致不同部位对应的部件滤波器重要性不同。例如在自然环境中,当鸟类被遮挡时,头部被遮挡比其他部位被遮挡对检测的影响更大,所以头部对应的滤波器比其他部位对应的滤波器更重要,但是传统 DPM 模型和 ACF-DPM 模型均未考虑到不同部件的重要性有所差异,当存在遮挡情况时,易造成误检和漏检。#p#分页标题#e#
..........
总结
鸟类检测作为目标检测中的一个重要方面,在诸多领域具有广阔的应用前景和实用价值。本文对鸟类检测的方法做出了详细的论述,其中,基于可变形部件模型(DPM)的目标检测算法取得了较好的效果,DPM 包括一个分辨率较低的根滤波器来覆盖滑动窗口中的整个目标,还包括若干个分辨率较高的部件滤波器通过进一步的细节特征来判断目标各组成部分的存在,以及每个部件相对于根的空间位置模型来对部件形变进行评估,这种由粗糙到精细的检测策略具有良好的检测效果。由于对目标形变具有很强的鲁棒性,所以该算法对于非刚性目标有较好的检测效果。但是,DPM 算法对鸟类的检测效果较差,主要原因是:鸟类目标种类较多,形变较大,检测难度较大;现有的鸟类数据集中鸟类样本数量过少,且分布不均衡;同时,DPM 算法提取的 HOG 特征只着重于描述目标的边缘信息,无法较好的表征鸟类目标;此外,DPM 算法没有研究不同目标的特性,均采用相同的训练策略,并且没有对不同滤波器的重要性加以区分,未能充分发挥各滤波器的作用。本文主要研究如何在 DPM 算法的基础上,提高其在自然场景中鸟类检测准确率的问题,通过详细分析鸟类目标的特征与检测难点,同时结合 DPM 算法存在的缺陷,合理选择适合鸟类目标检测的特征,并对模型进行了一系列的改进。本文主要贡献如下:
1.针对 DPM 算法由于现有数据集缺陷,造成鸟类准确率较低的问题,本文首先对现有数据集进行分析,对 ImageNet 数据集上的所有鸟类样本进行筛选和数据分析,最终选取自然场景中鸟类样本 1500 个,建立了一个自然场景鸟类数据集。另外,由于 HOG 特征通过计算梯度方向直方图来构建特征,能够较好地表达图像的轮廓信息,但是鸟类目标外观更加多变,较难检测,当存在背景复杂或目标遮挡等情况时,HOG 特征较难描述鸟类的轮廓,导致无法获取鸟类特征。针对这一问题,本文提出一种结合多通道特征(ACF)和 DPM 的自然场景鸟类检测算法,构建了一种 ACF-DPM 鸟类模型,ACF 特征相比于单一的 HOG 特征来说,增加了其他类型的特征通道,从而能更好的描述鸟类特征。在本文建立的鸟类数据集和标准数据集 PASCALVOC 2007 进行实验,理论分析和实验结果均可表明本文构建模型的有效性,提高了自然场景中鸟类的检测精度。
2.传统 DPM 算法对所有的目标均采用相同的参数设置策略进行训练,对某些外观变化较小的目标,比如行人和车辆具有较好的检测效果,但是鸟类具有更加多变的外观,DPM 未能充分分析鸟类目标的特殊性,成为其鸟类检测准确率较低的原因之一。针对这一问题,本文研究了 ACF-DPM 模型中不同的组件和部件个数对鸟类模型的影响,以及模型各个滤波器的尺寸对 ACF-DPM鸟类模型的影响,得出了一种最适合该模型的参数设置策略,提高了鸟类检测的准确率。此外,在 ACF-DPM 模型中,由于鸟类不同部位的重要性不同,导致不同部位对应的部件滤波器重要性不同。但是传统 DPM 算法并未考虑到不同滤波器的不同重要性,当存在遮挡情况时,易造成误检和漏检。针对该问题,本文提出了一种加权的 ACF-DPM 鸟类模型,对重要性不同的部件滤波器赋予不同的权值,使各部件之间具有区分性,使模型更加符合鸟类的特征。在本文建立的鸟类数据集和标准数据集 PASCALVOC 2007 进行实验,理论分析和实验结果均可表明本文构建的改进的 ACF-DPM 鸟类模型的有效性,进一步提高了自然场景中鸟类检测的准确率。
..........
参考文献(略)

