本文是一篇工程论文,工程论文摘要中应排除本学科领域已成为常识的内容;切忌把应在引言中出现的内容写入摘要;一般也不要对论文内容作诠释和评论(尤其是自我评价)。(以上内容来自百度百科)今天为大家推荐一篇工程论文,供大家参考。
第 1 章 绪 论
1.1 研究背景和意义
上个世纪 60 年代工业机器人问世,经过几十年的发展,工业机器人已经在汽车制造业、机械加工行业、电子电气行业、食品行业、木材与家具制造业等行业中得到广泛的应用。工业机器人的应用提高了产品的产量与质量,改善了生产安全问题,节约了原材料消耗以及降低了生产成本。随着科学技术的进步和用工荒的出现,用机器人代替人工完成一些重复、单调的工作已经成为了一种不可逆转的趋势。从 2009 年开始,我国的机器人市场进入高速增长阶段[1],到 2013 年,我国已经成为世界上使用工业机器人最多的国家,预计在未来 10 年到 15 年内不会发生改变[2]。但是目前工业机器人的主要产品被国外品牌垄断,如日本的安川机电和 FANUC,瑞士的 ABB、Staubli,德国的 KUKA 等,国外进口的工业机器人价格昂贵,一般的中小型企业难以承担高昂的成本。近年来国内也有一些品牌初露头角,如杭州新松、广州数控、南京埃斯顿、乐佰特等,但是由于技术垄断等原因,在同等条件下国外的产品技术参数都优于我国产品。随着工业机器人技术的向前发展,工业机器人产业的发展速度加快,结合了智能控制技术、多传感器融合技术的工业机器人向更智能、更柔性、更快速的方向发展。给机器人配备视觉系统好比给机器人安装了眼睛,使机器人能看清楚周边的世界,功能更加强大,完成许多以前不能完成的任务[3]。机器视觉技术作为一个全新的研究领域,发展十分迅速,研究成果层出不穷,现在与工业生产的结合,也成为制造业领域研究的热点[4]。
..........
1.2 国内外研究状况
1.2.1 视觉在工业机器人领域应用研究现状
现在的工业机器人普遍缺少对外界环境的感知能力,不具备像人类一样的感知能力,如视觉、听觉、触觉等,因此对环境的适应能力差,应用范围也就受到限制。人类获取的信息大约 80%来自于视觉,视觉检测具有获取信息量大、应用范围广、可靠性高、对目标物无损害的优势。为机器人配备上视觉传感器,好比给机器人安装了眼睛,这样机器人能更好的适应周边环境,使机器人的工作能力得到了提高,机器人的工作范围也得到了扩展。机器人与人工相比,在速度上更快、效率更高、稳定性更好。最开始工业机器人只是应用到上下料、搬运、热处理、焊接、码垛等一些比较简单的操作,后来逐渐应用到质量检测[5]、零部件装配[6]、机械加工、食品包装[7]、采摘[8]等更加复杂的领域。机器人要完成这些任务不仅要有强大的驱动,还需要许多其他新技术,比如智能传感器技术、通讯技术、控制技术、网络技术,随着新技术的应用,机器人达到了一个前所未有的新高度[9]。
.......
第2章 基于视觉的 Delta 机械手系统设计
2.1 引言
机械手要完成传送带上物体的抓取操作,一个性能优良的视觉控制系统不可或缺。整个系统不仅仅要快速识别目标物,得到目标物的位置和形状信息,还要控制机械手迅速抓取目标物放到指定位置。本章将分析系统的需求和难点所在,制定合适的方案。
..........
2.2 系统组成及其工作原理
如图 2.1 所示,摄像机在传送带上方,摄像机的光轴线与传送带表面垂直,传送带连续运转,当物件进入到摄像机视野中,系统通过摄像机来获得传送带上物体的图像信息,经过对图像的处理和分析,得到物体的位置信息,根据物件的位置信息和包装箱位置就可以规划机械手的抓取路径,通过机械手运动学逆解将位置信息换算成机械手控制信息,从而完成利用视觉引导机械手对目标物的抓取-放置操作。视觉系统根据运行环境的不同,可以分为 PC-Based(基于 PC)和 PLC-Based(基于 PLC)两种[34]。基于 PC 系统的可扩展性好,可靠性高,计算能力强,而且有许多软件都是基于 PC 运行的,鉴于以上因素,本文选择 PC 来作为系统的硬件平台。整个系统由运动控制系统、视觉系统两大子系统组成,如图 2.2 所示。运动控制系统主要由工业 PC、主板、扩展板、驱动器、机械装置组成;视觉系统主要由光源、摄像机、镜头、图像采集卡、工业 PC 组成。
..........
第 3 章 Delta 机械手及其运动控制系统设计............. 13
3.1 引言 ............ 13
3.2 Delta 机械手的结构设计........... 13
3.3 Delta 机械手的运动学分析 .......... 19
3.3.1 机械手运动学逆解分析 ...... 19
3.3.2 机械手运动学正解分析 ...... 20
3.3.3 逆解算法与正解算法验证 ..... 21
3.4 运动控制系统的设计 ..... 22
3.4.1 运动控制系统的硬件设计 ..... 22
3.4.2 运动控制系统的软件设计 ..... 25
3.5 本章小结 .......... 28
第 4 章 视觉系统设计.... 29
4.1 引言 ............ 29
4.2 视觉系统组成及硬件选型 .............. 29
4.3 摄像机标定 ......... 33
4.4 图像预处理 ......... 37
4.5 目标识别与定位 ....... 41
4.6 运动目标跟踪设计 ...... 43
4.7 本章小结 .......... 46
第 5 章 系统实现和性能测试 .... 47
5.1 系统运行流程 ........ 47
5.2 上位机控制软件介绍 ..... 48
5.3 性能测试 .......... 48
5.4 本章小结 .......... 53
第 5 章 系统实现和性能测试
5.1 系统运行流程
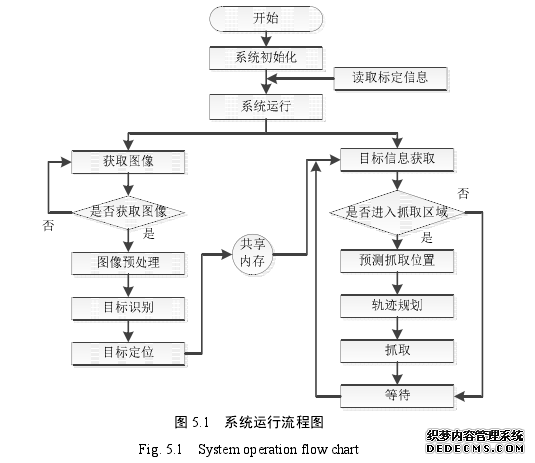
按照本文前面章节所设计,在实验室搭建完成整个实验系统,对本文的设计进行实际测试,验证其可行性,并为整个系统的改进提供依据。在传送带上任意摆放着待抓取的目标物,目标物随着传送带一起运动。首先由摄像机对进入指定区域内目标物进行拍摄,获取包含目标当前运动状态信息的图像,获得的图像经过数据传输给工业 PC,工业 PC 安装了图像处理软件,用 4.4 节设计好的图像预处理流程对图像进行预处理,以消除噪声、光照、以及传输过程中对图像带来的干扰,接下来进行灰度匹配,识别目标物,计算得到目标物的位置信息。然后视觉系统将目标位置信息传送给运动控制系统,运动控制系统则根据反馈回来的机械手当前位姿和目标位置,进行决策是否可以抓取目标,如果可以抓取,规划好机械手的路径;最后生成机械手的运动控制指令,控制机械手去抓取目标。图5.1 为系统流程图:
.........
总结
本文针对目前工业生产中应用的机械手柔性和智能化程度不高,对环境的适应能力较差的问题,提出一种基于视觉引导的机械手智能抓取方案,希望可以通过视觉技术来提升机械手的工作能力,扩展机械手应用范围。本文以 Delta 机械手在生产线上的工程应用为背景,在实验室模拟食品、电子、医药等轻工业包装生产线,研究机器视觉辅助机械手抓取定位技术在工业生产线上的应用,实现了Delta 机械手自动抓取目标物装箱。本文完成以下主要工作:
(1)提出了一种以视觉来引导机械手抓取目标物的实施方案,基于 PC 开发视觉子系统,以 Mega2560 开发板为主控单元设计运动控制系统,在实验室模拟了工业生产场景,对本文提出的方案进行验证,证明本文提出的方案是可行的,为系统的工程应用提供技术储备。
(2)对直线型 Delta 机械手的结构进行分析并做等效简化,采用解析法对结构的工作空间进行研究,并取工作空间的内切圆柱体作为设计空间,得到机械手运动范围的度量参数和结构参数的关系,再结合课题要求计算得到机械手主要构件的尺寸,完成了机械手的设计和制作。
(3)完成了机械手运动控制系统的设计,其中包括对机械手的运动学分析、轨迹规划、传送带控制及代码编写。
(4)对传统的相机标定方法进行了改进,在保证标定精度的同时使标定过程更加简单,有利于工程实践应用。在 VBAI 中完成了图像获取,图像预处理流程设计,目标识别和快速定位。
..........
参考文献(略)

