1绪论
1.1课题来源与研究背景
在人类赖以生存的地球表面,海洋面积占71%,而占海洋总面积92.4%的深海区域蕴藏着极其丰富的矿产资源。目前已探明具有商业开发前景的深海矿产资源有多金属结核(猛结核)、富钴结壳和热液多金属硫化物等[1]。多金属结核(Polymetallic Nodules)是目前最具开发前景,同时也是勘探程度最高的海底矿产资源。其广泛分布于3000?6000m深的海底表层,是由铁猛氧化物组成的黑褐色团块状物体,富含猛、镇、钴、铜、铁、鹤、钛、银、金、银、铀等76种元素。美国梅罗教授的研究报告指出,世界各大洋多金属结核的总储量约为3万亿吨,尤以太平洋分布最广,约1.7万亿吨[2]。多金属猛结核最富集区域位于东北太平洋的克拉里昂一克拉帕顿断裂带之间的海域(亦即太平洋C-C区,7?15°N,114?158°W)。这一区域是世界大洋海底结核中含铜、钴、镇、猛品位最高的矿床,平均丰度为12kg/rn2,平均品位为Mn:25.4%,Cu:1.28%,Ni:1.28%, Co:0.24%,具有较高的经济幵采前景⑴[3]。富钴结壳(Cobalt-Rich Crusts)是深海资源中最具潜在经济价值的又一矿产类型。其赋存于深海500-3000m的海底海山、岛均斜坡上的“壳状”沉积物,富含金、银、镜、铅、锌、铁、猛金属,以及钴、销、钛、铺等稀贵金属[4][5]。与大洋猛结核相比,钴结壳中Co的品位是猛结核矿中的2.5倍以上,品位高达0.8%?1.2%,最高可达2%。其覆盖率可达70%?100%,丰度可达30?70kg/m2。仅太平洋西部火山构造隆起带上,富钴结壳矿潜在储量已达到数亿吨,Co金属达数百万吨,较陆地原生矿高几十倍,Pt平均含量高于陆地相应矿床的80倍[6]。研究报告显示,中太平洋钴结壳中主要元素的平均含量为Co:0.79%,Ni:0.47%,Pt:0.24%[7]。
……….
1.2国内外深海采矿技术发展及现状
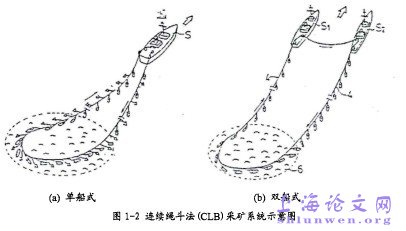
自二十世纪六十年代以来,西方发达国家相继投入大量资金、人力和物力,进行了大洋多金属结核采矿系统全面研究开发。先后研发出连续绳斗法(CLB)采矿系统、集矿机和管道提升采矿系统、穿梭艇式采矿系统等多金属结核开采系统。连续绳斗法采矿系统是1967年由日本人孟田善雄根据疏浚设备提出的,之后法国等多国相继参与了该方法的试验研究。该采矿系统结构较为简单,主要由采矿船、拖缆、索斗和牵引船组成。索斗按一定的间隙(约25米)均勻分布于拖缆之上,拖缆在牵引船的带动下带着索斗做下行、f产取和上行动作,构成连续采集环路,以此达到海底多金属结核的连续开采的目标。CLB方法按照牵引船的数量主要分为单船式和双船式[14][15]。值得一提的是双船式CLB方法可以有效克服单船作业时索斗互相缠绕的问题,日本于1970-1972年间采用连续绳斗法进行了深海采矿试验。试验地点位于南太平洋的格希提岛,水深3760m。试验表明该系统能正常地进行循环作业,并釆集到一些结核,但因链索缠绕问题而告终。连续绳斗法技术简单、造价低,可以满足不同水深变化的要求。但该方法对采集区域的要求较高,适用于大块平整且结核丰度变化不大的海底,因此开采效率较低,而且索斗对海洋生态环境有比较大的破坏。
……..
2深海履带式集矿机力学分析研究
2.1履带车辆地面力学特性研究
与一般车辆行走机构不同,履带式行走机构因其自身固有的结构特点被广泛应用于特殊复杂路面环境领域。对于深海6 km多金属结核及钴结壳矿产采运作业车辆设备(集矿机)而言,为保证其良好的动力性能,大多采用履带式行走机构。集矿机通过履带相对地面打滑而产生的剪切力获得动力,因此研究履带与地面的作用机理,是建立深海履带式集矿机力学模型的基础。本章以车辆地面力学作为理论基础,通过对深海履带式集矿机地面力学特性的研究得出集矿机驱动力与打滑率之间的关系;通过对集矿机工作环境下力学模型的建立,分析计算了集矿机驱动力和各种运动阻力,建立了集矿机运动学模型,为后文打滑控制的研究提出了理论基础。深海环境下履带式集矿机行走在极稀软的深海沉积物上。集矿机作业时,履带与沉积物之间的相互作用主要有两种形式:履带的沉陷作用和履带对沉积物的剪切作用。前者导致了集矿机行走过程中运动阻力的产生,后者则是集矿机行走动力的主要来源。地面土壤力学特性中,压陷特性是其重要指标之一,其直接决定行驶车辆的下陷程度和行驶性能。压陷特性集中反映了土壤的垂直承载能力。对于均质土壤,Bekker通过大量的实验建立了不同路面情况下车辆压力一沉陷关系[27]。
………..
2.2深海履带式集矿机地面力学特性研究
根据我国深海底集矿机的采矿作业方式,履带式集矿机采矿过程中主要以海底表层15-20c:m处的沉积物作为主要承载层和牵引层,因此,本文将此层的沉积物作为研究对象,并假设沉积物均质。同时我国深海履带式集矿机在釆矿作业过程中履带齿达到200 mm深的海泥层,由于深海底沉积物固有的土力学特性,其压力一沉陷关系以及剪切应力一剪切位移关系与传统的车辆地面力学特性会有所不同。为了模拟200 mm海泥层的土力学特性,选取一定比例的膨润土和水的混合物作为模拟海泥。就深海底200mm深的海泥层而言,其特性与2.1.2节讨论过的经典的三种类型土壤剪切应力一剪切位移关系中特征曲线2比较吻合。但无论是那种曲线,都是基于实验数据获得的,且公式(2-3)?(2-6)都是基于实验的经验公式。由于深海海泥的土力学特点并非完全相同,故其经验公式亦会有所区别。中南大学的周知进[43],湖南大学的王江营[1。7]对深海海泥做了大量的剪切实验研究,并得到了海泥剪切位移与剪切应力之间的关系。综合其实验结果,可以得到如图2-6所示的统计结果曲线。
………
3深海履带式集矿机行走打滑控制研究......... 39
3.1最佳打滑率辨识 ........39
3.2深海履带式集矿机液压驱动系统建模........ 41
3.3打滑控制系统设计........ 45
3.4打滑控制仿真结果与分析........ 53
3.5本章小结 ........59
4深海履带式集矿机路径跟踪控制研究........ 60
4.1集矿机路径跟踪控制问题描述........ 60
4.2集矿机的路径跟踪控制 ........61
4.3本章小结 ........94
5深海采矿系统开采作业过程整体联动控制研究........ 95
5.1中试釆矿系统1000m海试总体方案........ 95
5.2整体系统联动作业方式 ........96
5.3整体系统开采作业联动控制要求........ 99
5.4整体联动控制系统研究 ........103
5.5整体系统联动仿真研究........ 105
5.6本章小结 ........107
6深海履带式集矿机运动控制实验研究
6.1实验目的
实验研究在特定软底质条件下深海履带式集矿机行走过程中打滑控制策略和路径跟踪控制策略的有效性。通过实验,建立集矿机履带驱动力与打滑率之间的对应关系,验证第二章理论建立履带驱动力与打滑率关系的正确性;利用第四章设计的路径跟踪控制算法,通过集矿机实验过程中运动轨迹的分析,证明路径跟踪控制算法的合理性和正确性,为集矿机的设计提供参考。当沙土与水的混合比例逐渐减小时,模拟沉积物的最大剪切应力值与残余应力值均有所减小,亦即配比中水量增多,对应的沉积物呈现更加稀软状态,这与实际情况吻合。当水砂混合比例为1:1.5时,模拟沉积物的最大剪切应力约为4.78kPa,与实际海底原位测量值4.9kPa相近,故按此水土配比得到的模拟沉积物可作为实验车的行走底质。由于实验中涉及到实验车的力学计算,故需要确定以1:1.5水砂配比的模拟沉积物的压力一沉陷特性,实验中用到的测量仪器为PS型微型贯入仪,如图6-5所示。
……….
总结
论文以大洋多金属结核与富钴结壳幵采以及深海整体采矿系统为主要工程背景,针对履带式集矿机作业过程中主要运动控制问题进行了研究。建立了完善的集矿机力学和运动学模型;针对集矿机海底软底质行走过程中打滑和路径跟踪问题,提出了满足集矿机实际作业过程动力约束条件的控制算法,并对算法在工程上实际应用问题进行了分类讨论;对已有的深海作业方式进行了分析并提出适合实际幵采作业的整体联动开釆方式,为深海采矿整体系统联动控制问题奠定了理论基础。论文的主要研究成果总结如下利用经典履带车辆地面力学特性研究方法和经验公式,结合我国深海海底沉积物原位测试数据,通过测量膨润土和水配比而成的模拟沉积物的土力学参数,建立了海底软底质压力一沉陷关系以及剪切应力一剪切位移关系,推导并得到软底质驱动力与打滑率关系计算公式。对集矿机海底作业行走过程动力学特性进行分析,得到了压实阻力、推土阻力、水动力及软管力等运动阻力计算公式。建立了低速、髙速不同状态下集矿机力学模型,并对影响力学模型精度的关键参数进行了分析,提出了低速、高速动力学模型的转换条件。建立了集矿机运动学模型。#p#分页标题#e#
…………
参考文献(略)

