第一章 绪论
1.2 课题研究现状
1.2.1 图像处理研究现状
盲道范围的检测与方向的确定一般是采用图像处理等技术来进行实现。利用图像处理手段准确的将盲道区域与人行道区域分割开来,才能进行下一步工作。盲道区域的分割主要是基于图像分割算法来进行研究,图像分割算法是数字图像处理中最为重要的算法之一,从 20 世纪 70 年代起,分割算法始终都是图像技术中研究的核心,同样也是一个难点。直到现在,有许多算法设计师针对不同应用场景提出不同的算法来用于图像分割,这些分割算法大致可以分为以下几种。
基于阈值分割算法:除了经典的最大类间方差法,1985 年,Thierry Pun 等人提出一种利用图像对应直方图的熵进行阈值分割的方法[2]。2010 年,Gerald Schaefer 等学者以预处理算法配合迭代分割,提出一种提取病变区域的方法,增强待处理图像颜色以及对比度,分割效果俱佳[3]。还有林正春等人通过研究遗传理论与阈值分割这两种算法,并在二者的基础上提出的最优进化阈值分割算法,从而确保了算法获得的分割阈值趋于稳定值[4];周向阳等人针对传统图像分割中抗噪性能的不足等局限点,通过使用边缘算子确定边缘像素点,在此基础上通过一定条件筛选出两个边缘点与图像中的主对角线,进而确定图像中噪声和有用信息的边界[5];霍凤财等人通过研究二维直线交叉熵以及人工蜂群这两种算法,将它们相融合,以蜂群算法中的蜜源来代替图像分割中的阈值,以此设计适应度函数,最后达到分割效果[6]。
基于模型分割算法:Geman D 等学者提出一种处理纹理图像的方法,该方法由灰度数组以及标签数组的联合概率分布组成。刘蕊等人针对青少年骨骼发育等问题的研究,通过训练 Softmax 回归模型,得到分割图像时一个估测阈值,再使用区域生长法提取图像中的手的形状,最后对图像分割[7];兰红等人提出了基于分水岭算法的 Snake 模型,用来对肝脏图像进行分割,通过改进传统的分水岭算法,在此基础对 Snake 模型的轮廓线进行进一步的优化,使得肝脏图像的分割准确度提高[8]。
电力论文范文
第三章 纹理特征盲道分割算法研究
3.1 纹理特征提取
一个图像的纹理特征可以反映该物体表面特有结构信息。该特征与图像的其他特征毫无关联,而是直接反映图像的本身表面所具有的结构。纹理可以作为图像中一种具有代表性的区域特征,是对图像局部区域内每个像素点之间空间关系的一种描述。因为图像不同区域内的纹理可以代表图像不同区域内图像特有的信息,所以在图像处理领域,它都可以很好的表示图像各自的整体特点与局部特点,以及同一图像中多个区域之间的差异性,是图像分割的基础。
3.1.1 灰度共生矩阵
图像对应的共生矩阵是按照设定的方向与步长选取不
同位置的像素点,计算两像素点的联合概率密度而构成的,图像表面的亮度变化可以透过图像对应的矩阵得到,不仅如此,透过该矩阵也能看出图像中亮度相似的点之间存在怎样的位置关系,它是描述图像表面亮度变化的数学表达式,是提取图像纹理特征的典型方法。计算图像相对应的灰度共生矩阵(GLCM)时,首先选取一个值为 i 的像素点,将此点作为开始,再选取距离该点有一定距离与一定方向位置上的像素点,这个像素点的灰度值为j 的概率,将得到的这些概率数值按照矩阵的形式整合起来,便形成了该图像的共生矩阵,这个共生矩阵便被称为灰度共生矩阵。当图像的纹理的变化趋势缓慢时,分布在矩阵的对角线上的数值变大,当图像的纹理的变化趋势快速时,分布在灰度共生矩阵的对角线周围的数值变大[34,35]。一般来说,利用原始图像灰度级所形成对应的灰度共生矩阵,其包含的元素非常多,因此在图像处理时一般不会直接用这个矩阵来处理图像,基于此,一般会将图像的灰度级压缩,选取几个特定方向来进行计算,在根据共生矩阵计算出该图像的一些特征统计量。熵、对比度、能量、相关性、均匀性与方差等都是图像典型的特征值,在图像处理时,将这些特征值作为处理图像的条件。
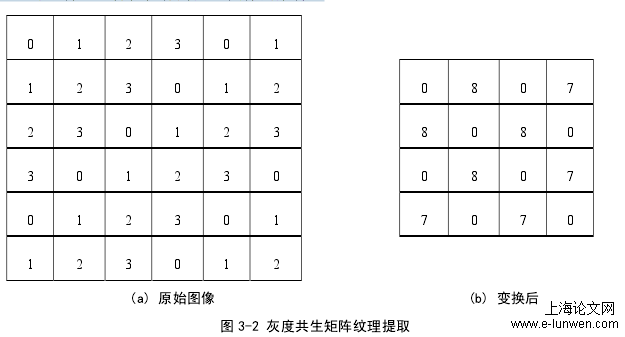
图 3-2 灰度共生矩阵纹理提取
第五章 盲道方向识别
5.1 多边形拟合轮廓
图像处理学中,检测目标图像的轮廓也是极为重要的一种技术手段,通过检测原始图像中目标对象的轮廓便有可能判断出图像中物体的形状,进而推测出物体的基本属性,由此可见检测目标区域轮廓的重要性,首先用滤波等预处理算法对采集到的盲道图像进行处理,在此基础上将图像中的盲道区域查找出来,然后边缘检测等处理,接下来便可以对图像中检测出来的目标区域进行轮廓提取,通过对轮廓分析得到物体的形状位置等信息。选择合适的多边形逼近轮廓,利用几何形状的边代替轮廓的各个部分,这样可以用直线代替原有轮廓曲线,最后利用角点检测算法边可以检测多边形的角点,进而根据角点判断盲道的方向。
5.1.1 提取转弯盲道轮廓
前面第二章与第三章分别根据具有颜色特征盲道图像与具有纹理特征盲道图像各自的特有属性,使用不同的改进算法进行盲道区域分割,第四章使用合适的算子对提取到的盲道区域进行了边缘检测,确定盲道区域,并且使用投影角度判断出盲道边界相对于视力障碍者的位置,但上述算法对于直行盲道而言效果更好。对于生活中存在的转弯盲道,为了确定其区域范围,可以根据边缘检测出来的盲道区域确定出盲道的轮廓,找到盲道的拐弯处,即找到盲道的拐点坐标,以此来定位盲道的大概形状,从而确定盲道的方向。
...................................
5.2 盲道拐点检测
Harris、SIFT 以及 Susan 等都是比较常见的角点检测算法。通过对上述几种检测算法的研究比较,由于 Susan 算法执行过程中使用的参数较少,以及它对计算量及储存量要求低,计算过程简单,抑制噪声能力好,具有旋转和平移不变性,故最终选取了 Susan 角点检测作为本课题的拐点检测算法[48]。
5.2.1 Susan 角点检测
Susan 检测方法是一种基于窗口的检测方法,通过遍历图像的像素点,在图像中的每个元素处构造一个圆形模板,以便于检测该点周围邻域内各方向同等性质的点,窗口内可以是常数权值或高斯权值,通常情况下该模板的半径为 3.4 个像素点。
Susan 算法通过比较中心像素点与其模板内的其他点之间的相似度来进行计算的,由于图像中角点的角度在尺度放大后并不会变化,经过一定程度的尺度放大后,图像中局部的曲度会慢慢平滑,但角点却不会发生变化,所以该算法具有旋转不变性以及一定程度的尺度不变性等优点[49,50]。
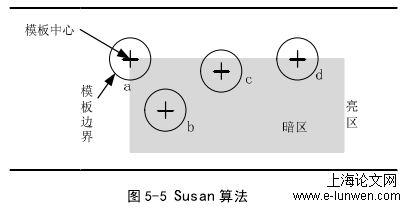
图 5-5 Susan 算法
..........................第六章 总结与展望
6.2 展望
相信随着科学技术的不断发展,会有越来越多高效的电子设备应用到视力障碍者群体中,使得视力障碍者可以通过语音信号的提醒从而安全便利的出行,随着图像处理技术的发展,也会有越来越多优秀的算法出现,使得这些设备可以应用到一些极端自然条件下的场合,本课题针对生活中的两种典型盲道区域进行提取,整体来讲,提取效果较好,但含有光照的纹理盲道图像,分割效果较差,为此,针对本课题的后续研究,本人提出几点建议:
(1)近年来,由于人工智能的快速发展,可以应用神经网络模型有目的训练大量盲道图像,通过机器学习,得到盲道更为抽象的特征,进而检测分割的准确性,更好的服务于盲人。
(2)生活中除了以上两种典型盲道外,还有一些破损的盲道,盲道突然断裂,前方出现障碍物等,为了使得算法的应用范围更广,可以借助图像识别方面的知识,在本文算法的基础上,提出检测障碍物的算法,将盲道上可能出现的物体的大小等信息反馈称语音信号,以便于盲人下一步的规划。
参考文献(略)

